Technology
The EL7332 and EL7342 2-channel DC motor terminals integrate a compact Motion Control solution up to 200 W in a compact design.
DC motor
DC motors can replace the considerably more expensive servo motors in many applications if they are operated with an intelligent controller. Since its speed is proportional to the voltage, the DC motor is easy to control in comparison with other motors.
Two DC motor output stages for optimum use
A DC motor can be integrated very simply into the control system using the EL7332 and EL7342 EtherCAT Terminals. All parameters are adjustable via the fieldbus. The DC motor output stages for EtherCAT unite a small, compact design with an extensive area of application. Two DC motors can be directly driven by the output stages. The EL7342 additionally possess an integrated feedback system for incremental encoders.
The velocity can be adjusted in simple fashion via the process data with the EL7332 and EL7342 EtherCAT Terminals. The integrated compensation of the internal resistance keeps the motor at the desired speed for load changes. The speed is preset by a 16 bit value from the automation device. Thus a simple drive task can be solved using a simple controller.
The EtherCAT Terminal contains two channels whose signal state is indicated by LEDs. This enables fast local diagnosis.
Areas of application
Two areas of application are particularly well supported by the output stages:
1. A simple controller with inexpensive processor power and low demands on the cycle time.
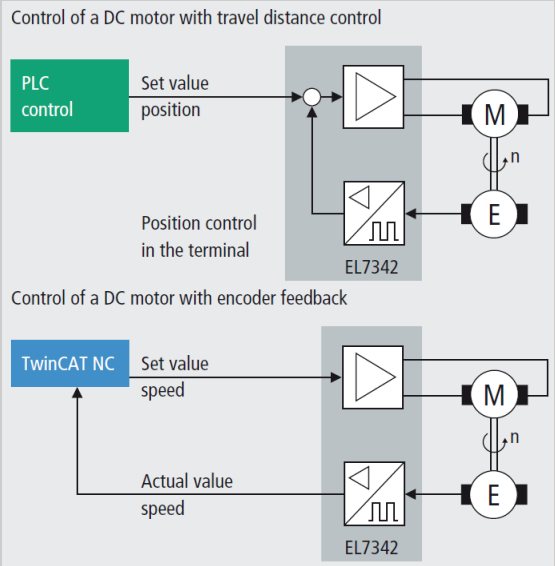
By the use of the integrated travel distance control, the terminal can perform positioning drives independently without the use of NC. Nothing further is required apart from a DC motor and an EtherCAT terminal.
2. High-end positioning with integration in TwinCAT NC.
In connection with the EtherCAT DC Motor Terminal, a DC motor is controlled under TwinCAT analogous to a servo terminal. No further changes are necessary.
For demanding positioning tasks a closed speed control loop with a feedback system is needed. The EL7342 EtherCAT terminal enables an incremental encoder to be connected.
The control loop can be closed either by the EtherCAT terminal itself or by the higher-level controller.
The peak current may briefly significantly exceed the nominal current and in this way makes the whole drive system very dynamic. In such dynamic applications, negative acceleration causes the feedback of energy, which lead to voltage peaks at the power supply unit. The EL9570 buffer capacitor terminal protects from the effects of overvoltage, in that it absorbs some of the energy. If the voltage exceeds the capacity of the terminal, it dissipates the excess energy via an externally connected resistor.