Field-oriented control
In the Extended Operation Modes the stepper motor is operated like a servomotor, based on the principle of field-oriented control.
Function
The operating behaviour of the motor corresponds to that of a traditional DC motor, with commutation via a mechanical commutator. With a constant exciter field, the torque of the DC machine is directly proportional to the stator current and can be directly influenced by it. The exciter field is generated, depending on the machine type, by permanent magnets or, with a separately excited DC machine, for example, via a separate excitation winding.
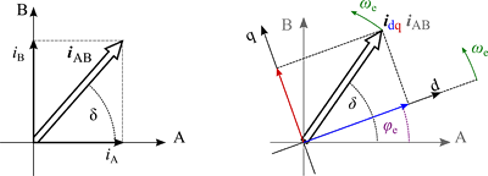 Fig.9: Coordinate transformation of field-oriented control
Fig.9: Coordinate transformation of field-oriented control For servomotors and also hybrid stepper motors, initially there is no direct link between the phase currents and the torque. Field and torque are decoupled mathematically via Park's transformation. Two current components, "d" for "direct" in field direction and "q" for "quadrature" in torque-forming direction, are calculated from the phase currents. Via the torque-forming current component iq, the torque of the machine can now be regulated directly, like for a DC machine.
A prerequisite is that the rotor position is available with sufficiently high accuracy. For a stepper motor the encoder resolution should be at least 4000 increments per mechanical revolution, in order to achieve adequate positioning accuracy. The minimum encoder resolution also depends on the number of full steps and can be calculated approximately as follows.
 Fig.10: Calculation of the resolution
Fig.10: Calculation of the resolutionCommutation determination for Extended Operation Modes
Because the absolute actual position is not available for incremental encoders, on system start-up there is no direct reference to the rotor position, which is required for field-oriented operation. Therefore, the reference between the actual position and the rotor position must be generated at start-up via a commutation determination process. During this process the rotor is moved forward and back several times up to two full steps.
 | Commutation determination
|
Control structure
The drive control structure is a cascade control structure with a position control loop and a lower-level speed and current control loop. If a speed setpoint is specified, the external position control loop can be omitted.
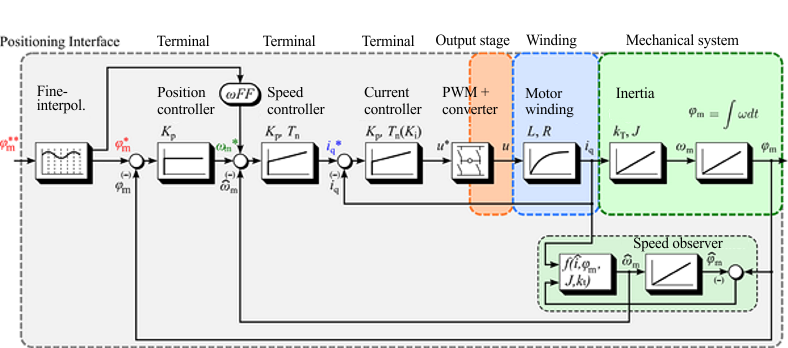 Fig.11: Cascade control structure with field-oriented control (Extended Operating modes)
Fig.11: Cascade control structure with field-oriented control (Extended Operating modes) Motor dependency
Due to the fact that the control is strongly dependent on the motor parameters, the controller parameters and motor behaviour itself, field-oriented control is limited to Beckhoff motors. This mode is not supported for motors from other manufacturers.
Main advantages compared with standard mode
- Low current consumption (almost full load-dependence)
- High efficiency
- Consistent dynamics compared with standard mode
- Step losses are inherently avoided
Requirement
- Encoder with sufficiently high resolution required (minimum 4000 [INC/360°])
- Slightly higher parametrisation effort required (speed controller)
- Commutation determination at startup (due to incremental encoder)
- Only possible with stepper motors from Beckhoff Automation (AS10xx)