Examples
Examples of two travel commands with a dynamic change of the target position
Without overrun of the target position
Time | POS Outputs | POS Inputs | Description |
|---|---|---|---|
t1: | Execute = 1 | Busy = 1 |
|
t2: |
| Accelerate = 0 |
|
t3: | Target position = 100000 |
|
|
t4: |
| Decelerate = 1 |
|
t5: | Execute = 0 | Busy = 0 |
|
t6 - t9: |
|
|
|
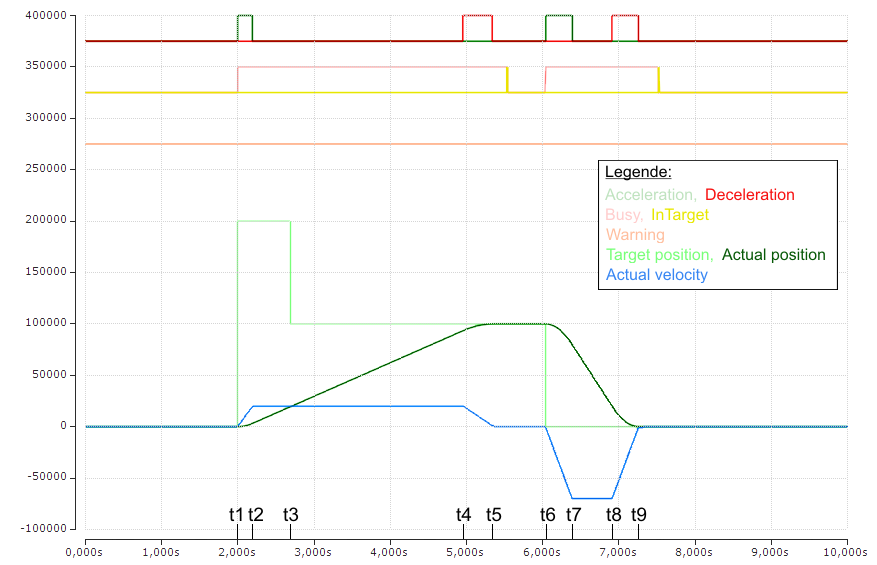 Fig.217: Scope recording of a travel command with a dynamic change of the target position, without overrunning the target position
Fig.217: Scope recording of a travel command with a dynamic change of the target position, without overrunning the target position(The axis scaling refers only to the positions, not to the speed or the status bits)
With overrun of the target position
Time | POS Outputs | POS Inputs | Description |
|---|---|---|---|
t1: | Execute = 1 | Busy = 1 |
|
t2: |
| Accelerate = 0 |
|
t3: | Target position = 100000 | Warning = 1 |
|
t4: |
| Accelerate = 1 |
|
t5: |
| Accelerate = 0 |
|
t6: | Execute = 0 | Busy = 0 |
|
t7 - t10: |
|
|
|
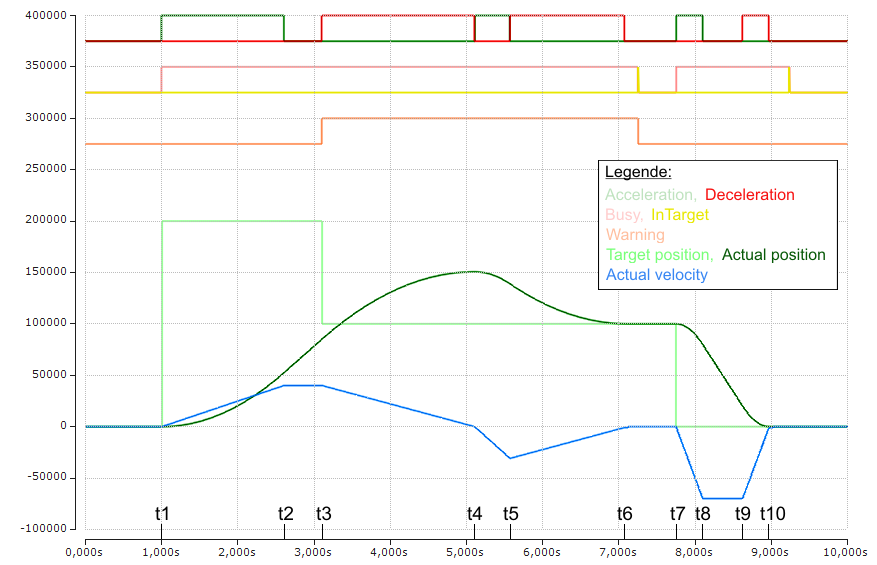 Fig.218: Scope recording of a travel command with a dynamic change of the target position, with overrunning of the final target position
Fig.218: Scope recording of a travel command with a dynamic change of the target position, with overrunning of the final target position(The axis scaling refers only to the positions, not to the speed or the status bits)