Examples of two travel commands with a dynamic change of the target position
Without overrun of the target position
Time | POS Outputs | POS Inputs | Description |
|---|---|---|---|
t1: | Execute = 1 | Busy = 1 |
|
t2: |
| Accelerate = 0 |
|
t3: | Target position = 100000 |
|
|
t4: |
| Decelerate = 1 |
|
t5: | Execute = 0 | Busy = 0 |
|
t6 - t9: |
|
|
|
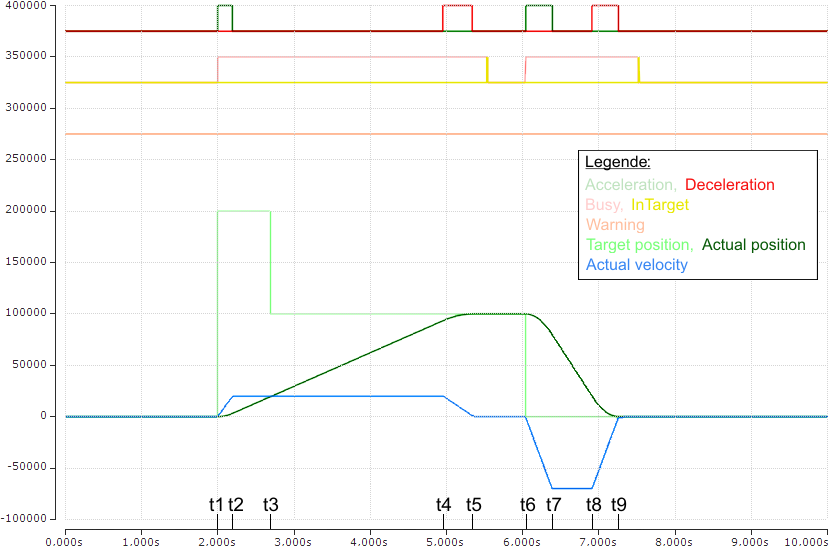 Fig.188: Scope recording without overrunning the target position
Fig.188: Scope recording without overrunning the target positionThe axis scaling refers only to the positions, not to the speed or the status bits.
With overrun of the target position
Time | POS Outputs | POS Inputs | Description |
|---|---|---|---|
t1: | Execute = 1 | Busy = 1 |
|
t2: |
| Accelerate = 0 |
|
t3: | Target position = 100000 | Warning = 1 |
|
t4: |
| Accelerate = 1 |
|
t5: |
| Accelerate = 0 |
|
t6: | Execute = 0 | Busy = 0 |
|
t7 - t10: |
|
|
|
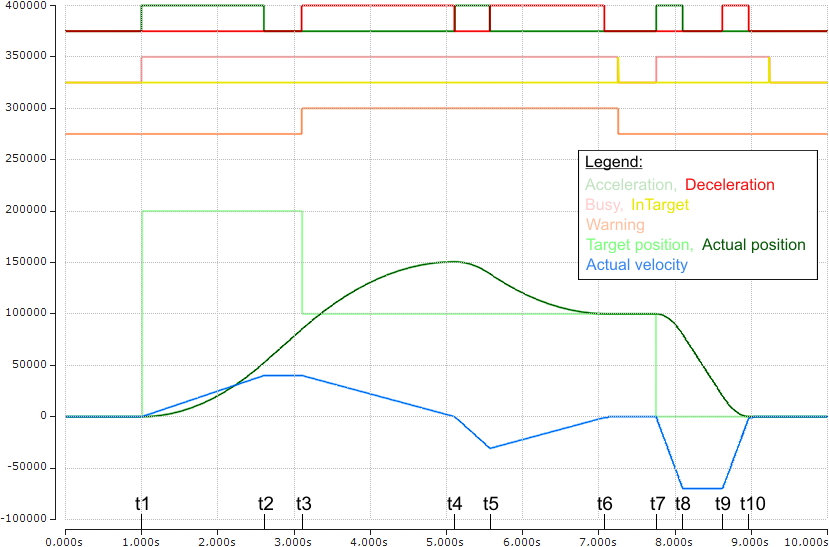 Fig.189: Scope recording with overrunning of the final target position
Fig.189: Scope recording with overrunning of the final target positionThe axis scaling refers only to the positions, not to the speed or the status bits.