Following error monitoring
Following error monitoring is available in CSP operation mode.
Requirements
Following error monitoring only works if an encoder is connected. The parameter 0x8n10:64 "Commutation type" must be set to a value not equal to "Stepper with internal counter".
Enable
Following error monitoring is disabled in the factory setting.
If the above requirements are met, you can enable following error monitoring by setting the parameter 0x8n10:50 "Following error window" to a value other than the default value 0xFFFF FFFF.
Configure
You can configure the following error monitoring with the following parameters:
- 0x8n10:50 "Following error window" is the amount of the maximum permissible following error in [Inc] (encoder increments). To convert this value into an angle or a distance, you must multiply it by the encoder scaling factor.
If the following error exceeds the "Following error window", the "Following error time out" starts.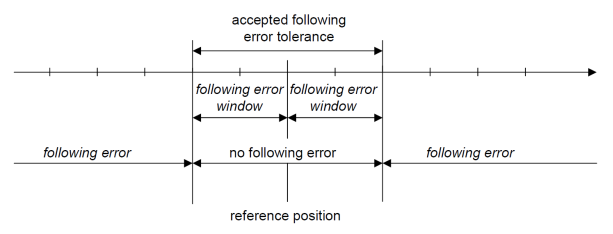
- 0x8n10:51 "Following error time out" is the maximum permissible timespan in milliseconds that the following error may be outside the "Following error window".
If this timespan is exceeded, the terminal stops the motor and outputs an error.
Monitoring
The variable "Following error actual value" in the process data object "DRV Following error actual value Channel n" contains the current following error.
Example

In this example, the following error exceeds the "Following error window" twice:
- The first time it falls below it again before the "Following error time out" expires.
- The second time, the "Following error time out" is also exceeded, e.g. due to a blocked rotor. The terminal stops the motor and issues an error message.