Velocity correction control
Velocity correction control for the analog measured value 1 is enabled by enabling the PDOs “STM Position” (0x1603) and “STM Velocity” (0x1604) at the same time (see Figure).
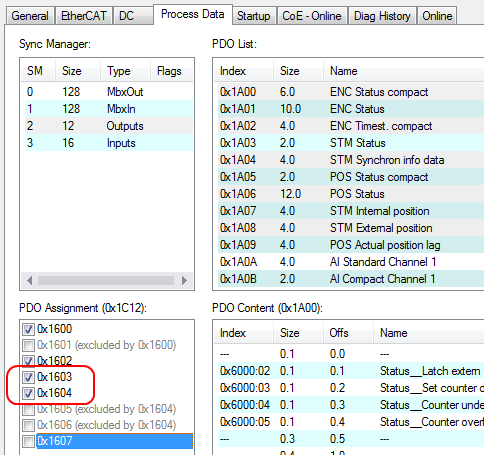 Fig.182: Activate PDOs
Fig.182: Activate PDOsThe PDO “STM Velocity/Velocity” is used for the basic velocity specification. The actual control value is provided by the PDO “AI Standard Channel 1/Value”. The set value is specified via the PDO “STM Position/Position” (see Figure)
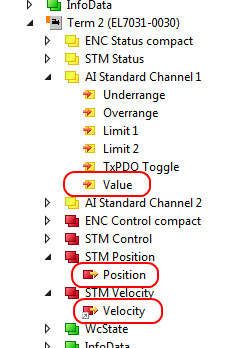 Fig.183: Required PDOs
Fig.183: Required PDOsIf zero is specified as the set value, the control is disabled. If the set value is greater than zero, the control is active and a velocity offset is generated depending on the control error, which is accumulated with the specified velocity value.
Attention: The offset may also become negative!
Any change in the direction of rotation is suppressed. This means that the minimum velocity value that is possible is zero.
The control parameters of the PI controller are specified through index 0x8013:01 Kp factor (velo./pos.) or index 0x8013:02 Ki factor (velo./pos.). Index 0x8013:06 Filter cut off frequency (velo./pos.) is used for limiting the controller output. (see Figure)
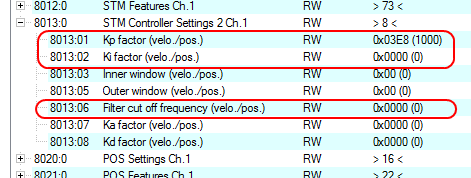 Fig.184: Controller parameters
Fig.184: Controller parametersThe following relationship always applies for the velocity specification and the limit: +/- 100% corresponds to +/- 32767
Please also note/ensure that index 0x8012:01 Operation mode is set to “Automatic” (see Figure).
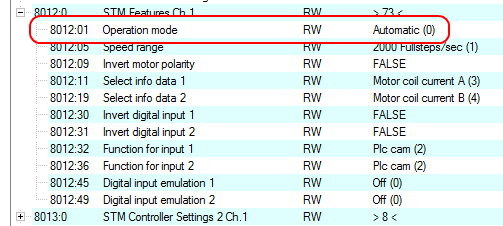 Fig.185: Operation Mode
Fig.185: Operation Mode