NC configuration (motion)
 | Installation of the latest XML device description Please ensure that you have installed the corresponding latest XML device description in TwinCAT. This can be downloaded from the Beckhoff Website and installed according to the installation instructions. |
The configuration of the axes and linking in the TwinCAT System Manager (Config mode) are described below, taking the EL5151 as an example. Proceed as follows:
Adding a Motion element
Right-click Motion
Select Add New Item... in the pull-down menu (Fig. Motion, add item).
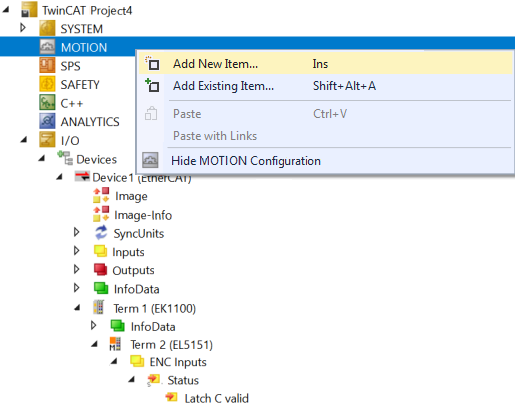 Fig.135: Motion, add item
Fig.135: Motion, add itemSelect the configuration type NC/PTP NCI Configuration.
Name the task and confirm with OK (Fig. Select type, name and confirm task)
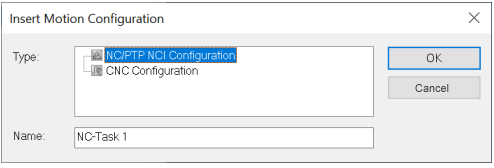 Fig.136: Select type, name and confirm task
Fig.136: Select type, name and confirm taskAdding an axis
Right-click Axes
Select Add New Item in the pull-down menu (Fig. Insert axis).
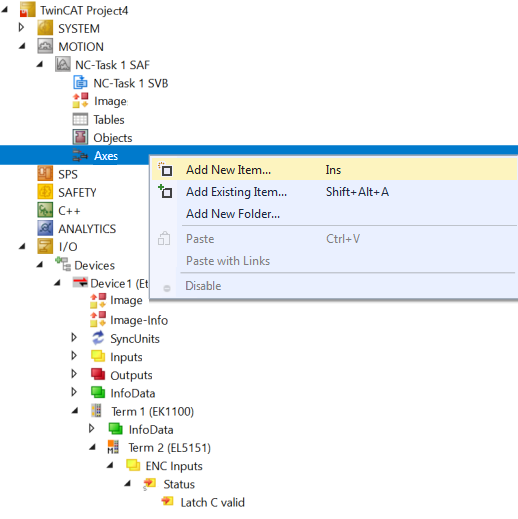 Fig.137: Insert axis
Fig.137: Insert axisChoose a name for the axis
Select the Encoder axis type and confirm with OK (Fig. Naming the axis and selecting the type)
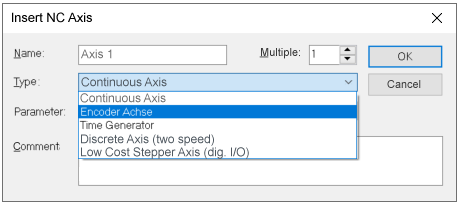 Fig.138: Entering a name for the axis and selecting a type
Fig.138: Entering a name for the axis and selecting a typeLinking the encoder
After selecting the NC Encoder tab select Encoder (KL5101/Kl5111/IP5109/EL5101/EL5151/Profile MDP 511) in the Type pull-down menu (Fig. Selecting the encoder)
Click the button Linked to...
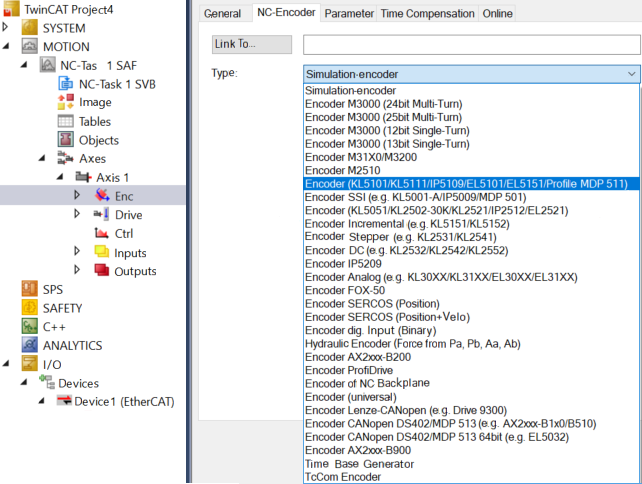 Fig.139: Selecting the encoder
Fig.139: Selecting the encoderSelect the EL5151 terminal and confirm with OK (Fig. Select and confirm the encoder terminal)
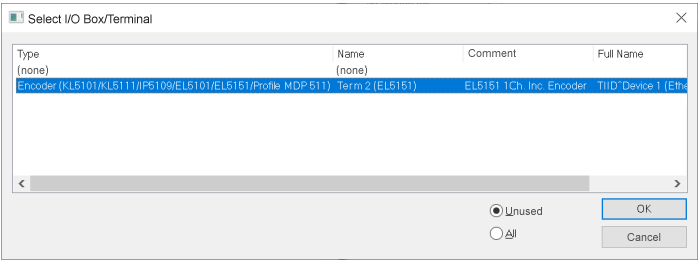 Fig.140: Selecting and confirming an encoder terminal
Fig.140: Selecting and confirming an encoder terminalDisplay of the linked inputs and outputs
The corresponding inputs and outputs of the EL5151 are now linked to the NC task (Fig. Inputs and outputs of the EL5151 linked to the NC task)
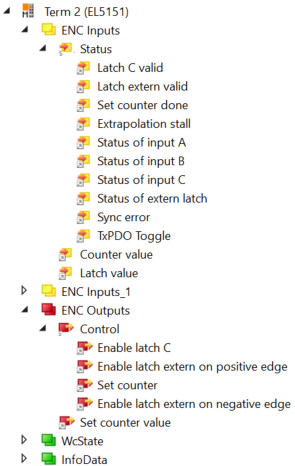 Fig.141: Inputs and outputs of the EL5151 linked to the NC task
Fig.141: Inputs and outputs of the EL5151 linked to the NC task