Operation mode (trigger mode)
Trigger via the communication cycle, frame-triggered:
- "FreeRun/SM-synchron"
As soon as an EtherCAT communication addresses the EL5021, it starts a new position determination. The EtherCAT communication is usually started by the PLC/NC task.
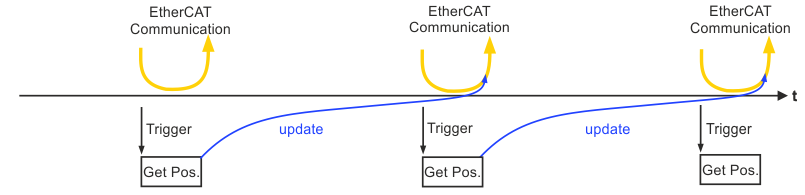 Fig.138: frame-triggered EtherCAT communication
Fig.138: frame-triggered EtherCAT communicationTrigger via the terminal's own distributed clock
- "DC-synchron (input based)"
The DC unit of the terminal triggers the position determination shortly before the next collecting EtherCAT telegram, so that the most up-to-date possible value is available for collection. - "DC-synchron"
In the setting "DC-synchron" the EL5021 is operated in the DC group of output terminals, as a result of which it does not determine its position shortly before the EtherCAT communication, but shortly after the communication. The data are thus significantly older.
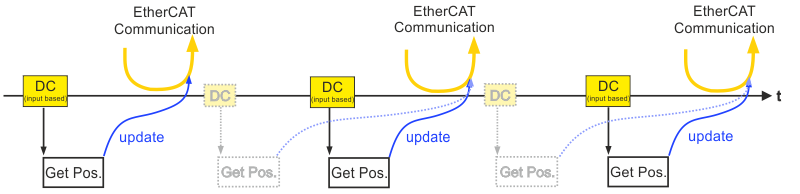
DC synchron (input based) triggered EtherCAT communication
The precise DC time of the position determination is not output by the EL5021 as process data, but instead can be displayed for all terminals via the advanced terminal settings (see fig. Advanced Settings in the TwinCAT System Manager) or via the EtherCAT Master --> Advanced Settings -->MasterSetting --> IncludeDcTimeOffsets. These values are calculated once during the creation/activation of the configuration and do not change any further during runtime.
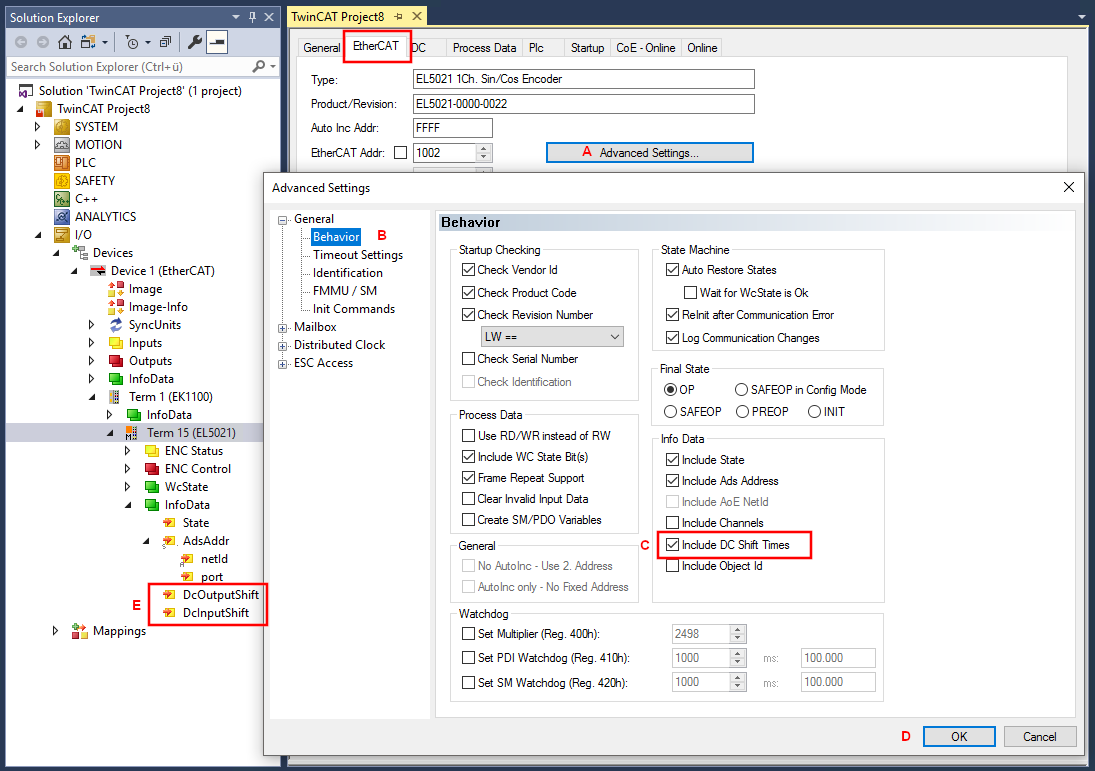 Fig.139: Advanced Settings in the TwinCAT System Manager
Fig.139: Advanced Settings in the TwinCAT System Manager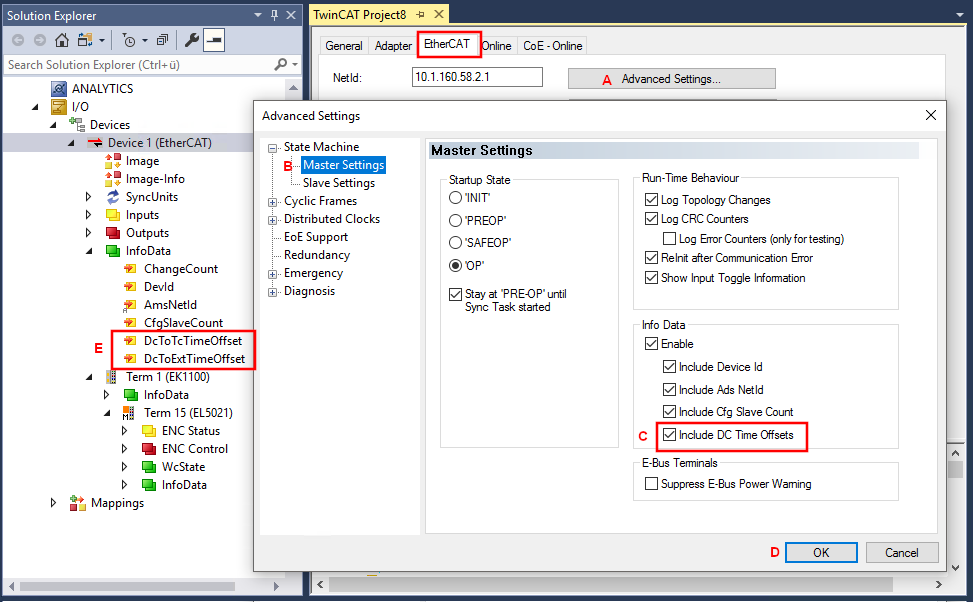 Fig.140: Advanced settings of the EtherCAT master in the TwinCAT System Manager
Fig.140: Advanced settings of the EtherCAT master in the TwinCAT System ManagerThe determination of the current position is subject to a constant delay of several µs. This delay is already taken into account in TwinCAT when calculating the InputShiftTime, so that the actual determination time and the calculated time coincide.
The minimum possible sampling rate of the EL5021 is 80 µs and therefore also the minimum possible EtherCAT cycle time.