In the EL4374, channels 1+2 are analog inputs, channels 3+4 are analog outputs.
In the default setting, the EL4374 works with the configuration 2x analog input with Real32-PDO and 2x analog output with Real32-PDO.
The input channels are set to Interface ±10 V, Floating Point, Extended Range.
The output channels are set to Interface ±10 V, Floating Point, Extended Range.
Fig.143: TwinCAT tree EL4374, online values as an example
The terminal contains several functions that are controlled
by enabling/disabling cyclic process data (PDO) at commissioning time in the EtherCAT master
by setting/changing so-called CoE settings in the device, this can be done during runtime
The functions of this terminal are explained in the following Analog input/output commissioning chapters.
for CoE parameterization:
CoE registers are named below, the "n" in the index stands for the channel number in the terminal: Channel 1: n = 0, channel 2: n = 1, ...
The CoE values cannot be read in real-time; they are updated in the online display in TwinCAT approx. every second, or can be get (or written, depending on the type) from the controller via ADS with an update rate of up to a few ms (depending on the EtherCAT cycle time).
Fig.144: CoE online tab
Before initial commissioning, it may be useful to reset the CoE parameters of the terminal using CoE reset by entering the value after 0x1011:01; this covers all channels (see chapter "Restoring the delivery state")
"Default" or "Default setting" means that the setting named in this way is the basic setting ex factory or CoE reset.
Temporal operating behavior of the EL4374 The terminal operates constantly with the conversion time specified in the "Filter" chapter, regardless of the EtherCAT cycle time applied. It supports the following EtherCAT operation modes
FreeRun: yes if filter is enabled; regardless of the EtherCAT cycle, the terminal processes its AI/AO data at the conversion rate specified in the Filter chapter; EtherCAT cycle times supported by the terminal: 100 µs ... 100 ms
SM-synchron (frame triggered): yes if filter is disabled; data processing in the terminal is triggered by the EtherCAT frame, but not faster than 500 µs; EtherCAT cycle times supported by the terminal: 100 µs ... 100 ms
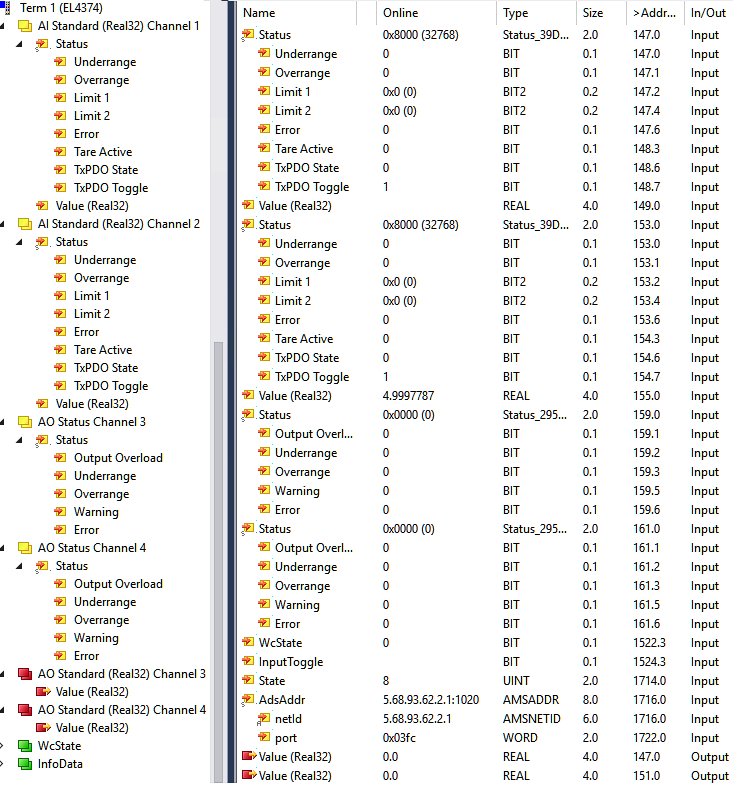 Fig.143: TwinCAT tree EL4374, online values as an example
Fig.143: TwinCAT tree EL4374, online values as an example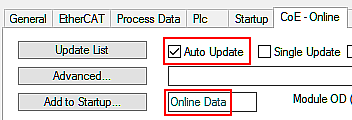 Fig.144: CoE online tab
Fig.144: CoE online tab