Basic principles
The EL2595 has a special feature in DC mode: usually the DC unit in the ESC (EtherCAT Slave Controller) is managed by the EtherCAT master. In the case of the EL2595, however, the local controller manages the start time and sets appropriate values in the ESC.
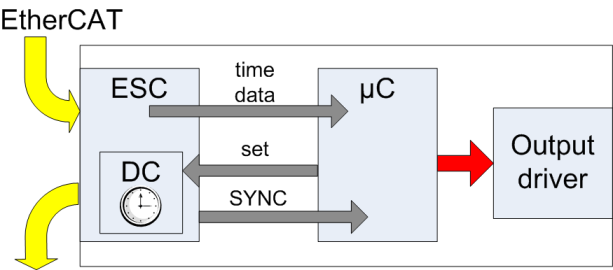 Fig.150: EL2595 DC schematic
Fig.150: EL2595 DC schematicThe controller (B) receives timestamps, activation and target states as normal process data from the ESC (A). It parameterizes the ESC to the next start time. At the set time the ESC informs the controller of this via the SYNC signal and the controller then activates the output stages accordingly.
For this reason the corresponding DC entries cannot be changed in the TwinCAT System Manager despite DC mode, but the EL2595 can nevertheless be used as a ReferenceClock.
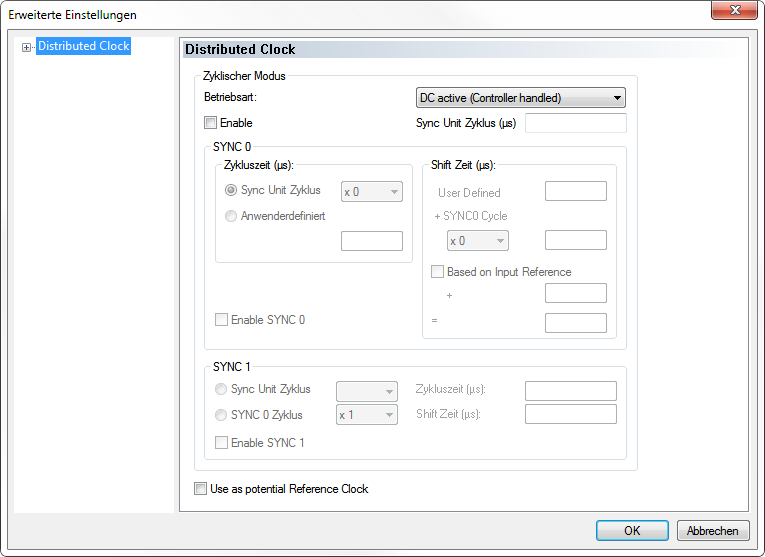 Fig.151: EL2595 DC settings
Fig.151: EL2595 DC settings