EK9500 - EtherCAT configurations
The EK9500 is an EtherCAT master with automatic configuration, i.e. all EtherCAT Terminals must always be present when switching on the system. Since the boot-up of the EK9500 generally takes considerably longer than the start-up of the EtherCAT slave devices, the latter can be operated on the same power supply. With decentralized EtherCAT slaves, care must be taken that they are switched on earlier or at the same time as the supply voltage..
Switching EtherCAT devices on or off during the runtime
If one or more EtherCAT devices should fail during the operating phase, an error response is generated. The input data of all EtherCAT devices are then invalid and the output data are no longer accepted. This also applies to the devices that are still in operation on the EK9500. If you wish to use the option to plug in or unplug devices during the runtime, a further “Sync Unit” must be configured. This is not possible with an EK9500. In this case, use a CX8090.
EtherCAT topology
All EtherCAT devices must be entered in the order in which they map themselves on the EK9500 and thus on the EtherCAT master. EtherCAT devices are automatically addressed; with a few exceptions all EtherCAT Bus Terminals are equipped with an EtherCAT ASIC. EtherCAT Terminals without an ASIC are, for example, EL9400, EL9070 and other EL9xxx. You can identify these EtherCAT Terminals using the technical data "Message to E-bus". If there is a "-" here, this terminal need not be taken into account for the mapping.
EtherCAT devices are registered in the direction of the EtherCAT telegram.
Sample configuration with EK1100 EtherCAT coupler
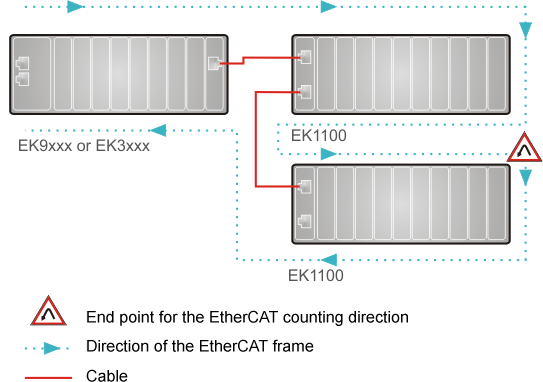 Fig.27: Sample configuration with EK1100 EtherCAT coupler
Fig.27: Sample configuration with EK1100 EtherCAT couplerSample configuration with EPxxxx EtherCAT Box
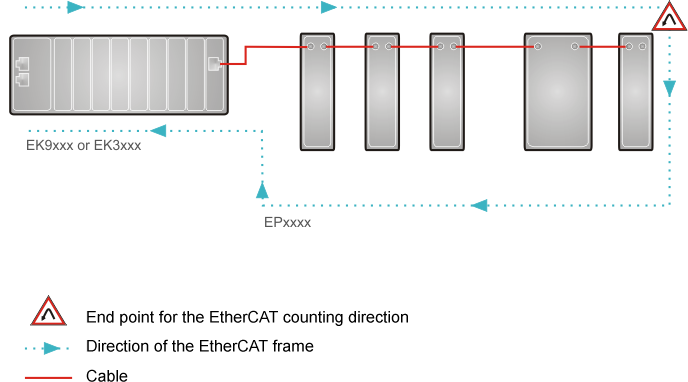 Fig.28: Sample configuration with EPxxxx EtherCAT Box
Fig.28: Sample configuration with EPxxxx EtherCAT BoxSample configuration with EK1122 2-port EtherCAT junction
The counting direction is to be observed when using an EK1122.
If EtherCAT junction 1 on the EK1122 is connected, then the EtherCAT frame is forwarded here first (1); if junction 1 is not connected the frame on junction 2 is sent (2), only after that does the sequence continue with the E-bus on the right-hand side (3).
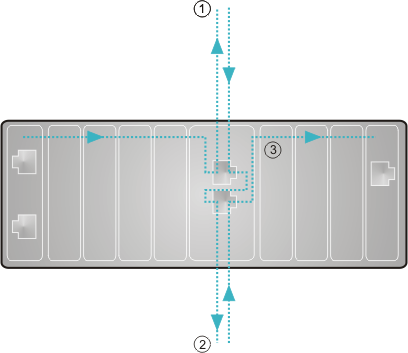 Fig.29: Sample configuration with EK1122 2-port EtherCAT junction
Fig.29: Sample configuration with EK1122 2-port EtherCAT junctionIf neither junction is used, then junctions 1 and 2 are bridged, so to speak, and the EtherCAT frame goes directly to the E-Bus on the right-hand side.
Example configuration with EP1122 (2-port EtherCAT junction in protection class IP65)
The counting direction is to be observed when using an EP1122! It is comparable with the EK1122.
If EtherCAT junction 1 on the EP1122 is connected, then the EtherCAT frame is forwarded here first (1); if junction 1 is not connected, the frame on junction 2 is sent (2), only after that does the sequence continue with the EtherCAT connection on the right-hand side (3).
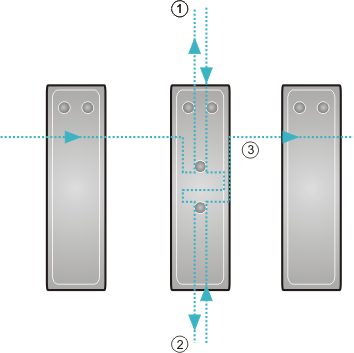 Fig.30: Sample configuration with EP1122 (2-port EtherCAT junction in protection class IP65)
Fig.30: Sample configuration with EP1122 (2-port EtherCAT junction in protection class IP65)If neither junction is used, then junctions 1 and 2 are bridged, so to speak, and the EtherCAT frame goes directly to the EtherCAT connection on the right-hand side.
 | No Hot Swap during operation You cannot use the EP1122 and EK1122 on an EKxxxx for Hot Swap and also not for connection and disconnection during operation. EP1122 and EK1122 are suitable only for topology extensions (star) on an EKxxxx. |