CoE Interface
General description
The CoE interface (CAN application protocol over EtherCAT)) is used for parameter management of EtherCAT devices. EtherCAT slaves or the EtherCAT master manage fixed (read only) or variable parameters which they require for operation, diagnostics or commissioning.
CoE parameters are arranged in a table hierarchy. In principle, the user has read access via the fieldbus. The EtherCAT master (TwinCAT System Manager) can access the local CoE lists of the slaves via EtherCAT in read or write mode, depending on the attributes.
Different CoE parameter types are possible, including string (text), integer numbers, Boolean values or larger byte fields. They can be used to describe a wide range of features. Examples of such parameters include manufacturer ID, serial number, process data settings, device name, calibration values for analog measurement or passwords.
The order is specified in two levels via hexadecimal numbering: (main)index, followed by subindex. The value ranges are
- Index: 0x0000 …0xFFFF (0...65535dec)
- SubIndex: 0x00…0xFF (0...255dec)
A parameter localized in this way is normally written as 0x8010:07, with preceding “0x” to identify the hexadecimal numerical range and a colon between index and subindex.
The relevant ranges for EtherCAT fieldbus users are:
- 0x1000: This is where fixed identity information for the device is stored, including name, manufacturer, serial number etc., plus information about the current and available process data configurations.
- 0x8000: This is where the operational and functional parameters for all channels are stored, such as filter settings or output frequency.
Other important ranges are:
- 0x4000: here are the channel parameters for some EtherCAT devices. Historically, this was the first parameter area before the 0x8000 area was introduced. EtherCAT devices that were previously equipped with parameters in 0x4000 and changed to 0x8000 support both ranges for compatibility reasons and mirror internally.
- 0x6000: Input PDOs (“input” from the perspective of the EtherCAT master)
- 0x7000: Output PDOs (“output” from the perspective of the EtherCAT master)
 | Availability Not every EtherCAT device must have a CoE list. Simple I/O modules without dedicated processor usually have no variable parameters and therefore no CoE list. |
If a device has a CoE list, it is shown in the TwinCAT System Manager as a separate tab with a listing of the elements:
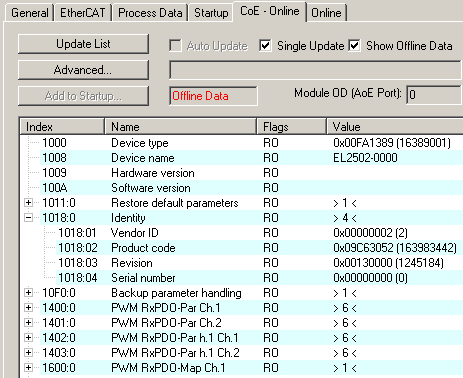
The figure above shows the CoE objects available in device “EL2502”, ranging from 0x1000 to 0x1600. The subindices for 0x1018 are expanded.
Data management and function “NoCoeStorage”
Some parameters, particularly the setting parameters of the slave, are configurable and writeable. This can be done in write or read mode
- via the System Manager (Fig. “CoE Online” tab) by clicking
This is useful for commissioning of the system/slaves. Click on the row of the index to be parameterized and enter a value in the “SetValue” dialog. - from the control system/PLC via ADS, e.g. through blocks from the TcEtherCAT.lib library
This is recommended for modifications while the system is running or if no System Manager or operating staff are available.
| Data management If slave CoE parameters are modified online, Beckhoff devices store any changes in a fail-safe manner in the EEPROM, i.e. the modified CoE parameters are still available after a restart.
|
| Startup list Changes in the local CoE list of the terminal are lost if the terminal is replaced. If a terminal is replaced with a new Beckhoff terminal, it will have the default settings. It is therefore advisable to link all changes in the CoE list of an EtherCAT slave with the Startup list of the slave, which is processed whenever the EtherCAT fieldbus is started. In this way a replacement EtherCAT slave can automatically be parameterized with the specifications of the user. If EtherCAT slaves are used which are unable to store local CoE values permanently, the Startup list must be used. |
Recommended approach for manual modification of CoE parameters
- Make the required change in the System Manager
The values are stored locally in the EtherCAT slave - If the value is to be stored permanently, enter it in the Startup list.
The order of the Startup entries is usually irrelevant.
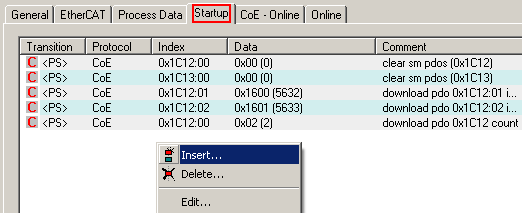
The Startup list may already contain values that were configured by the System Manager based on the ESI specifications. Additional application-specific entries can be created.
Online/offline list
While working with the TwinCAT System Manager, a distinction has to be made whether the EtherCAT device is “available”, i.e. switched on and linked via EtherCAT and therefore online, or whether a configuration is created offline without connected slaves.
In both cases a CoE list as shown in Fig. “CoE online tab” is displayed. The connectivity is shown as offline/online.
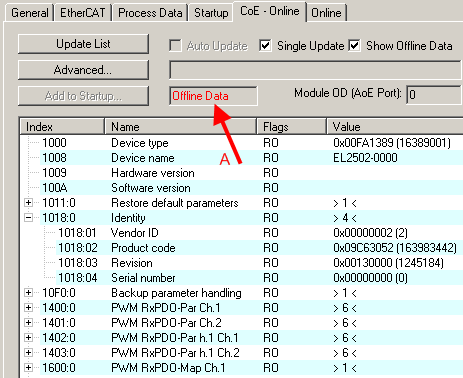
- If the slave is offline
- The offline list from the ESI file is displayed. In this case modifications are not meaningful or possible.
- The configured status is shown under Identity.
- No firmware or hardware version is displayed, since these are features of the physical device.
- Offline is shown in red.
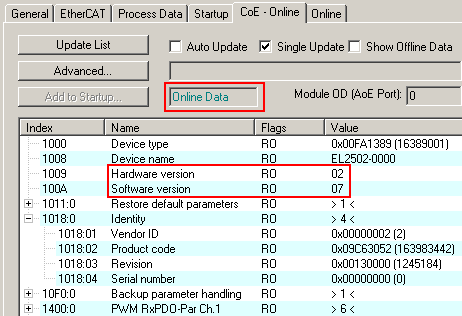
- If the slave is online
- The actual current slave list is read. This may take several seconds, depending on the size and cycle time.
- The actual identity is displayed
- The firmware and hardware version of the equipment according to the electronic information is displayed
- Online is shown in green.
Channel-based order
The CoE list is available in EtherCAT devices that usually feature several functionally equivalent channels. For example, a 4-channel analog 0...10 V input terminal also has four logical channels and therefore four identical sets of parameter data for the channels. In order to avoid having to list each channel in the documentation, the placeholder “n” tends to be used for the individual channel numbers.
In the CoE system 16 indices, each with 255 subindices, are generally sufficient for representing all channel parameters. The channel-based order is therefore arranged in 16dec/10hex steps. The parameter range 0x8000 exemplifies this:
- Channel 0: parameter range 0x8000:00 ... 0x800F:255
- Channel 1: parameter range 0x8010:00 ... 0x801F:255
- Channel 2: parameter range 0x8020:00 ... 0x802F:255
- ...
This is generally written as 0x80n0.
Detailed information on the CoE interface can be found in the EtherCAT system documentation on the Beckhoff website.