CSTCA (torque control with commutation angle)
CSTCA is the abbreviation for "Cyclic Synchronous Torque with Commutation Angle".
This operation mode is a torque control like CST. In addition, the user has the option of specifying the commutation angle.
You cannot use the TwinCAT NC to specify the speed and commutation angle.
- The CST operation mode is set in 0x7010:03 "Modes of operation" as described in "Setting the operation mode".
- The Predefined PDO Assignment "Torque" is set as described in "Selection of process data".
- 1. Enable process data "Commutation angle"
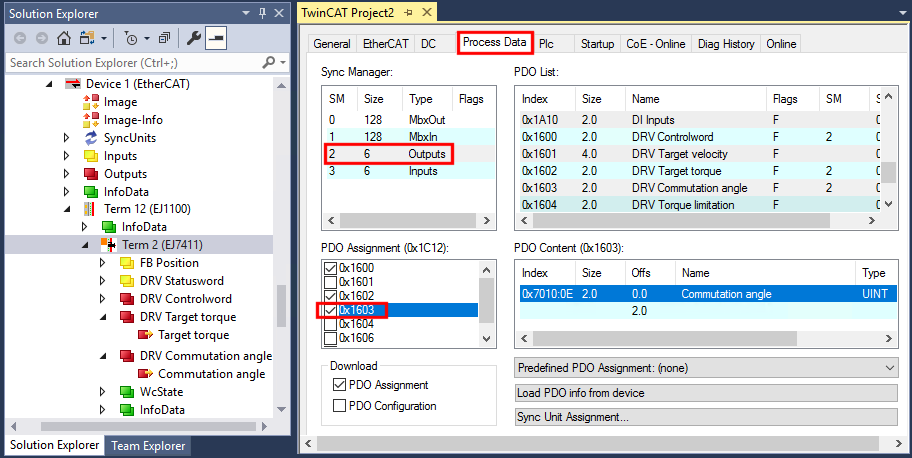
The process data "Commutation angle" is located in the process data object "DRV Commutation angle" (index 0x1603), which is not enabled in the factory setting.
Enable the process data object "DRV Commutation angle" as follows: - Click the "Process Data" tab.
- Click on "Outputs" in the "Sync Manager" box.
- Check 0x1603 in the box "PDO Assignment (0x1C12)".
- If the module is linked to an NC axis, a dialog box appears:
- In the dialog box, click "No".
- 1. Setting torque and commutation angle
- Set the torque via the process data "Target torque".
- Use the process data "Commutation angle" to set the angle to be maintained with the torque defined in the process data "Target torque".
 | Cycle time For all operation modes, the cycle time must be an integer multiple of 62.5 µs, When using the drive motion control (DMC), the cycle time must not be faster than 250 µs. |