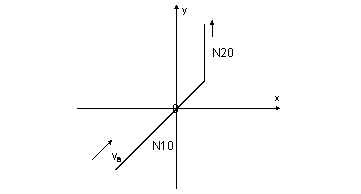
Contour with non tangential block transitions
An abrupt change in the acceleration and high jerk takes place at non tangential block transitions of a prismatic workpiece if the path velocity is not reduced to zero at block transition point. Independent of that characteristic the control is limiting the axis acceleration to maximum permissible values.
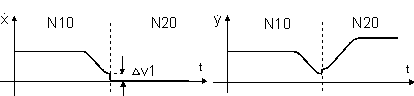
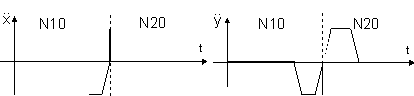
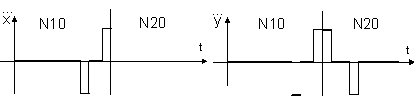
This behavior is shown below with the example of a 45 degree contour knee in velocity, acceleration and jerk profile of axes.
Parameterization
The permissible acceleration at the block transition is weighted by means of the P-AXIS-00013parameter.
By means of the value 0, the influence of this parameter changes to jerk limitation, and the weighting of the permissible acceleration with the cycle time/ramp time factor applies. The permissible axis jerk limits in accordance with the ramp time parameters P-AXIS-00195..- P-AXIS-00198 and the acceleration parameters P-AXIS-00011 and P-AXIS-00012 are active. The path velocity at non tangential block transition is very small.
The parameter must set to a higher value if higher speeds are to be run with correspondingly higher jerk at the block transition. At the value 1000 (upper limit), the acceleration is maintained at the block transition and the jerk exceeds the set limit.
a = a * (P-AXIS-00013) / 1000. trans
j = a /t. trans trans zykl
A value > 0 may make sense whenever it is undesirable for technological reasons for the contouring speed to drop depending on the set acceleration at slightly discontinuous block transitions.
A value < 1000 may make sense if machine structure has vibrations or oscillations at block transition.
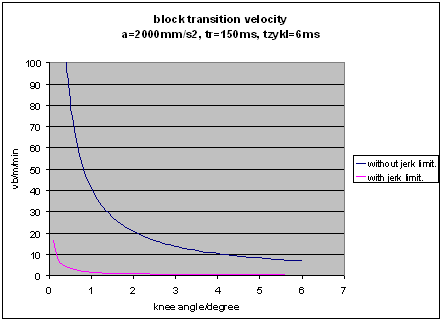
The influence of jerk limitation to block transition velocity between two non-tangential movement blocks with different knee angles is shown below.
Excerpt from the axis parameter list:
Jerk limiting:
getriebe[0].dynamik.a_trans_weight 0No jerk limiting:
getriebe[0].dynamik.a_trans_weight 1000