Power supply terminal
K-bus interface
It is possible to operate K-bus terminals on the CX80xx.
The CX80xx recognizes these terminals automatically on scanning, reads out the terminal types and automatically places them in the System Manager.
 Fig.2: K-Bus Interface
Fig.2: K-Bus InterfaceK-bus state
The K-bus status is saved in the state byte (see fig. K-bus interface "1"). If the value is 0 the K-bus is operating synchronously and without errors. If the value should be <>0 this can be an error, but it may also be just a notice that, for example, the K-bus requires longer than the employed task and is thus no longer synchronous to the task. The task time should be faster than 100 ms. We recommend a task time of less than 50 ms. The K-bus update time typically lies between one and five ms.
Bit 0 = K-Bus Err
Bit 1 = Terminal State Err
Bit 2 = Process Data Length Err
Bit 8 = No valid Inputs
Bit 9 = K-Bus Input Update busy
Bit 10 = K-Bus Output Update busy
Bit 11 = Watchdog Err
Bit 15 = Acyc. Function atcive (e.g. K-Bus Reset)
If there is a K-bus error, this can be reset via the IOF_DeviceReset function block (in the TcIoFunctions.lib).
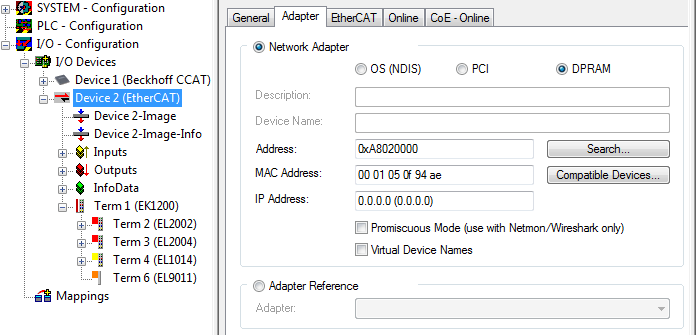
The NetID is that of the CX80xx and can thus be entered as an empty string, the Device ID (see fig. K-bus Interface "2") is to be taken from the System Manager.
E-bus interface
The operation of E-bus terminals and EtherCAT devices is possible on the CX80xx.
The CX80xx recognizes these terminals automatically on scanning, reads out the terminal types and automatically places them in the System Manager.
 | DC Distributed Clocks The CX80xx series is not suitable for the use of EtherCAT slaves that use or need distributed clocks functionality. |