K-bus
The power supply unit checks the connected Bus Terminals for errors. The red LED "K-bus ERR" is off if no error is present. The red LED "K-bus ERR" flashes if Bus Terminal errors are present.
Display | LED | Meaning |
|---|---|---|
| Us 24 V | Power supply for basic CPU module. The LED lights green if the power supply is correct. |
Up 24V | Power supply for terminal bus. The LED lights green if the power supply is correct. | |
K-BUS RUN | Diagnostic K-bus. The green LED lights up in order to indicate error-free operation. "Error-free" means that the communication with the fieldbus system is also running. | |
K-BUS ERR | Diagnostic K-bus. The red LED flashes to indicate an error. The red LED flashes with two different frequencies. |

The frequency and number of the flashes can be used to determine the error code and the error argument. An error is indicated by the "K-bus ERR" LED in a particular order.
Order | Meaning |
|---|---|
Fast flashing | Starting the sequence |
First slow sequence | Error code |
No display | Pause, the LED is off |
Second slow sequence | Error code argument |
Count how often the red LED K-bus ERR flashes, in order to determine the error code and the error argument. In the error argument the number of pulses shows the position of the last Bus Terminal before the error. Passive Bus Terminals, such as a power feed terminal, are not included in the count.
Error code | Error code argument | Description | Remedy |
|---|---|---|---|
Persistent, continuous flashing |
| EMC problems. |
|
3 pulses | 0 | K-bus command error. |
|
4 pulses | 0 | K-bus data error, break behind the power supply unit. | Check whether the Bus End Terminal 9010 is connected. |
n | Break behind Bus Terminal n. | Check whether Bus Terminal n+1 after the power supply unit is connected correctly; replace if necessary. | |
5 pulses | n | K-bus error in register communication with Bus Terminal n. | Replace Bus Terminal at location n. |
6 pulses | 0 | Error at initialization. | Replace Embedded PC. |
1 | Internal data error. | Hardware reset of the Embedded PC (switch off and back on again). | |
8 | Internal data error. | Hardware reset of the Embedded PC (switch off and back on again). | |
7 pulses | 0 | Process data lengths of the set and actual configurations do not correspond. | Check the configuration and the Bus Terminals for consistency. |
For some error the LED "K-BUS ERR" does not go out, even if the error was rectified. Switch the power supply for the power supply unit off and back on again to switch off the LED after the error has been rectified.
State variable
In TwinCAT there is a State variable under the Bus Coupler for K-bus diagnostics.
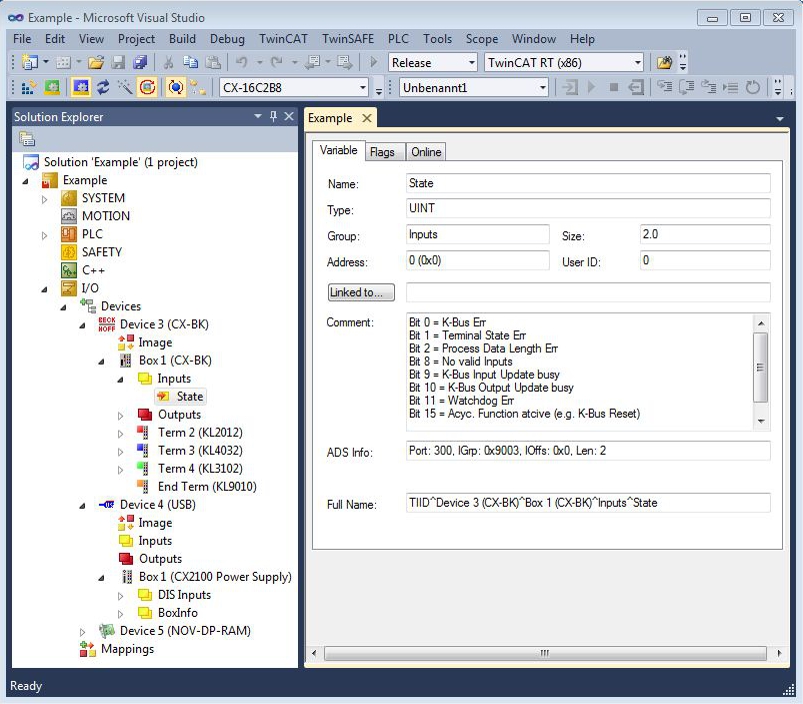 Fig.54: Status variable for error handling and diagnostics under TwinCAT.
Fig.54: Status variable for error handling and diagnostics under TwinCAT.If the value is "0", the K-bus operates synchronous and without error. If the value is <> "0" there may be a fault, or it may only be an indication that the K-bus cycle is longer than the task. In which case it would no longer be synchronous with the task. The task time should be faster than 100 ms. We recommend a task time of less than 50 ms. The K-bus update time typically lies between one and five ms.
Bit | Description |
|---|---|
Bit 0 | K-bus error. |
Bit 1 | Terminal configuration has changed since the start. |
Bit 2 | Process image lengths do not match. |
Bit 8 | (still) no valid inputs. |
Bit 9 | K-bus input update not yet complete. |
Bit 10 | K-bus output update not yet complete. |
Bit 11 | Watchdog. |
Bit 15 | Acyclic K-bus function active (e.g. K-bus reset). |
If there is a K-bus error, this can be reset via the IOF_DeviceReset function block (in the TcIoFunctions.lib).