K-bus and E-bus interface
EtherCAT Terminals (E-bus) or bus terminals (K-bus) can optionally be connected directly on the right-hand side; the CX7000 automatically recognizes which system is connected during the start-up phase.
K-bus interface
The CX7000 reads out the terminal types during scanning and creates them in the System Manager under a bus coupler.
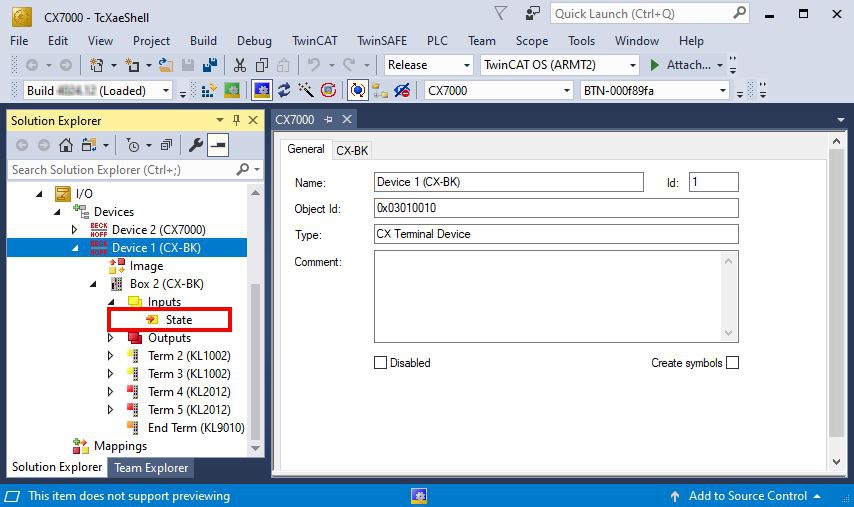 Fig.30: K-bus interface of a CX7000 in the TwinCAT System Manager.
Fig.30: K-bus interface of a CX7000 in the TwinCAT System Manager.For K-bus diagnostics there is a status variable in TwinCAT under the bus coupler, which can be used for diagnostic purposes and indicates the status of the K-bus communication. For more information, refer to the chapter "Error handling and diagnostics" at K-bus.
E-bus interface (EtherCAT)
 | EoE (Ethernet over EtherCAT) EtherCAT slaves that use EoE for communication or configuration are currently not supported on the CX7xxx. |
| Distributed clocks The Embedded PCs of the CX70xx series are not suitable for the use of EtherCAT slaves that use distributed clocks or require them. |
The operation of EtherCAT Terminals and EtherCAT devices is also possible on the CX7000. The CX7000 also recognizes these terminals automatically during scanning, reads out the terminal types and creates them in the System Manager under an EtherCAT Coupler.
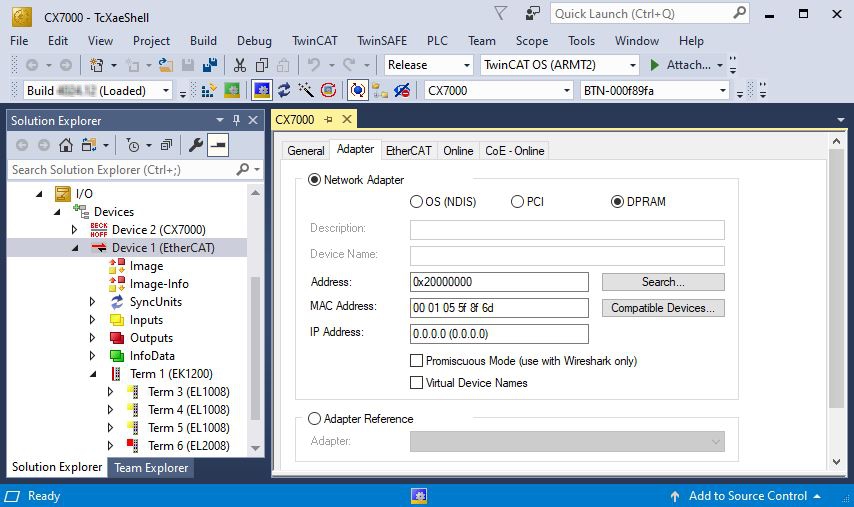 Fig.31: E-bus interface of a CX7000 in the TwinCAT System Manager.
Fig.31: E-bus interface of a CX7000 in the TwinCAT System Manager.For more information on diagnostics, refer to the chapter "Error handling and diagnostics" at E-bus.