General notes
Special behavior is expected from the converter, depending on whether EtherCAT or standard Ethernet telegrams are to be transferred.
Use in: Standard Ethernet 10/100/1000*) MBit
An Ethernet connection is a managed point-to-point connection between two intelligent end devices.
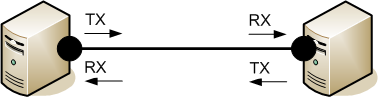 Fig.16: Point-to-point connection between two Ethernet devices
Fig.16: Point-to-point connection between two Ethernet devicesBoth devices transmit the so-called idle pattern in their Ethernet connection. When they also receive a corresponding pattern, the connection and thus the so-called Link has been established. Both devices then know that they can use this connection. If the connection is interrupted, the link is lost and both devices are notified.
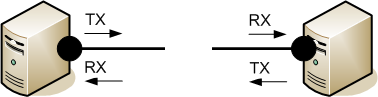 Fig.17: Interrupted point-to-point connection
Fig.17: Interrupted point-to-point connectionIf a media converter is placed between the two stations, it too becomes an intelligent transmitter/receiver. If connection C is interrupted, device A would not necessarily be informed and would continue to send data to the converter via the existing link B, and the data would "trickle away". The CU15x1 therefore supports Link Loss Forwarding (LLF) in a selected direction. The notification is indicated by a label on the CU15x1. If the converter detects an interruption of connection C in switch setting 1 in Fig. Interposed media converter in the Ethernet connection, it also interrupts link B.
 Fig.18: Interposed media converter in the Ethernet connection
Fig.18: Interposed media converter in the Ethernet connectionIn both IP settings the CU15x1 operates as a store and forward network device with checksum function. Frames that are faulty (CRC error), too short (<64 bytes) or too long (>1522 bytes) are not passed on.
 | Frame size in Ethernet mode In Ethernet MOD, only a frame size of 64 to 1522 bytes (CU1521-0020: 64 to 9018 bytes) is supported. |
*) For possible data rates, see the respective device description |
Used for: EtherCAT 100 Mbit
Other characteristics are required if it is used as a media converter in an EtherCAT network:
- Consistently low delay in the frame transit, irrespective of frame length
- Fast link detection when the connection is established and interrupted
- Identification as separate EtherCAT device with diagnostic function
EtherCAT slaves process the EtherCAT telegrams in forward direction from the perspective of the master. Accordingly, in the CU15x1 the forward direction may be X1 --> X2 or X2 --> X1, depending on the application. It has to be set at the rotary switch prior to commissioning. The direction of the arrow of S1 indicates the set forward direction.
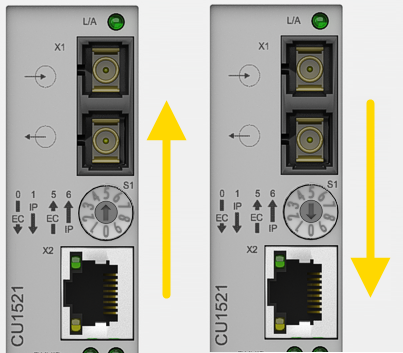 Fig.19: Setting the forward direction at the media converter
Fig.19: Setting the forward direction at the media converterMake sure the rotary switch is set to the right position, so that the CU15x1 operates in forward direction. For example, in Fig. Copper -> optical fiber-> copper operation of two media converters, the CU15x1 on the left operates as a copper --> optical fiber converter (rotary switch position 5), the CU15x1 on the right operates as an optical fiber --> copper converter (rotary switch position 0).
 Fig.20: Copper -> optical fiber-> copper operation of two media converters
Fig.20: Copper -> optical fiber-> copper operation of two media convertersIf the opposite direction of rotation is set, the subsequent behavior depends on the EtherCAT master. The scanned CU15x1 may be inserted at a different position in the topology, or an INIT_VPRS error message of the EtherCAT master may occur.