Type 1: standard method
Description
The standard method (type 1) is selected by setting the P-AXIS-00172 parameter to the value 1.
This method uses a parameter-definable estimation filter to calculate the permissible position lag (Figure 3). With the time constant P-AXIS-00167 of the filter, this can be parameterized. The permissible position lag is calculated depending on the speed and lies within the parameter-definable range. At standstill, the minimum permissible position lag P-AXIS-00169 describes the maximum permissible position lag and, in the case of dynamic position lag monitoring, the low limit of the permissible position lag. The P-AXIS-00168 parameter is the maximum permissible position lag. A time offset of the permissible position lag can be realized with the P-AXIS-00170 parameter.
∆szul ≈ vakt
∆szul: calculated permissible position lag
vakt: current travel speed
 | The standard method (type 1) does not take the KV factor into account when calculating the maximum position lag. This means that position lag monitoring must be checked and possibly defined again after a change in the KV factor. |
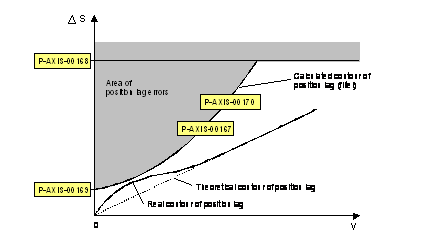 Fig.3: Position lag monitoring type 1 - standard method
Fig.3: Position lag monitoring type 1 - standard method | Recommended parameter definition P-AXIS-00169removed link: P-AXIS-00169 ≥ 5 · ∆sStandstill, ∆sStandstill: real position lag at standstill (even when the axis is at standstill, due to the resolution of the encoder and of the measurement system we arrive at a remaining position lag ∆sStandstill). |