Notes on tracing possibilities
On MC_ReadStatus, the following output values are suitable for tracing: lr_act_pos, lr_act_rev, ipo_a_act. They present the current position, speed and acceleration setpoints in each cycle.
Example from Multiprog:
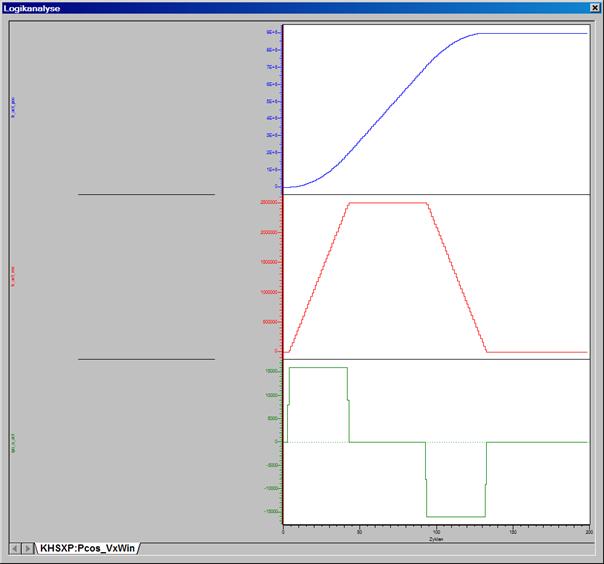
Trace of an unfiltered movement with a linear slope
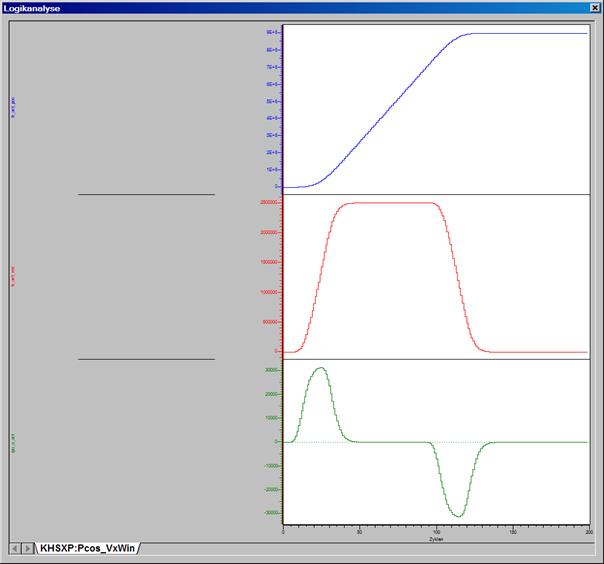
Trace of the filtered movement with double acceleration
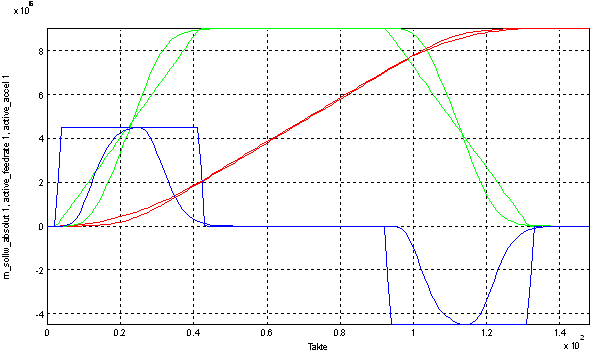
Superpositioning of both traces (note: for technical reasons, the acceleration is not true to scale here!).