Introduction
Mechanical collision of feed units whose travel ranges overlap is prevented with the axis collision monitoring function. The travel ranges run in parallel.
For example, this is the case with a linear drive that has two primary parts as encountered in gantry or bar kinematic machines.
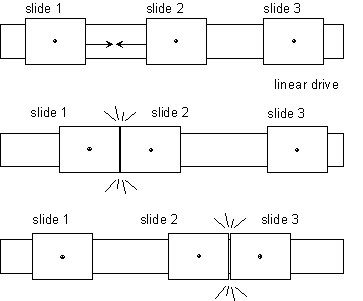 Fig.1: Three slides on one linear drive
Fig.1: Three slides on one linear drive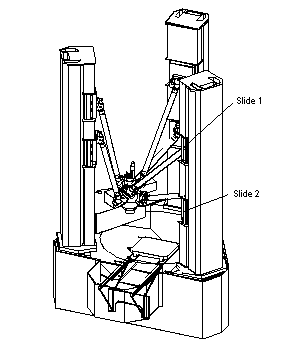 Fig.2: Example of Hexapod
Fig.2: Example of Hexapod