Determining the mechanical commutation offset
Several values can be correct for the mechanical commutation offset. The number of correct values depends on the number of pole pairs of the motor.
Example:
For a motor with three pole pairs (six poles), there are three possible values for the mechanical commutation offset, spaced 120° apart.
Abridged procedure:
 | Adjustable commutation mechanical value! Before determining the mechanical commutation offset, check whether the value "Adjustable commutation mechanical" in P-0-0-0150 is set to 0. If this is not the case, set the value to 0 and activate the TwinCAT configuration. Then perform the steps described below. |
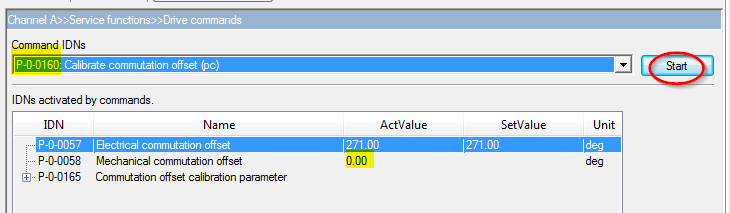
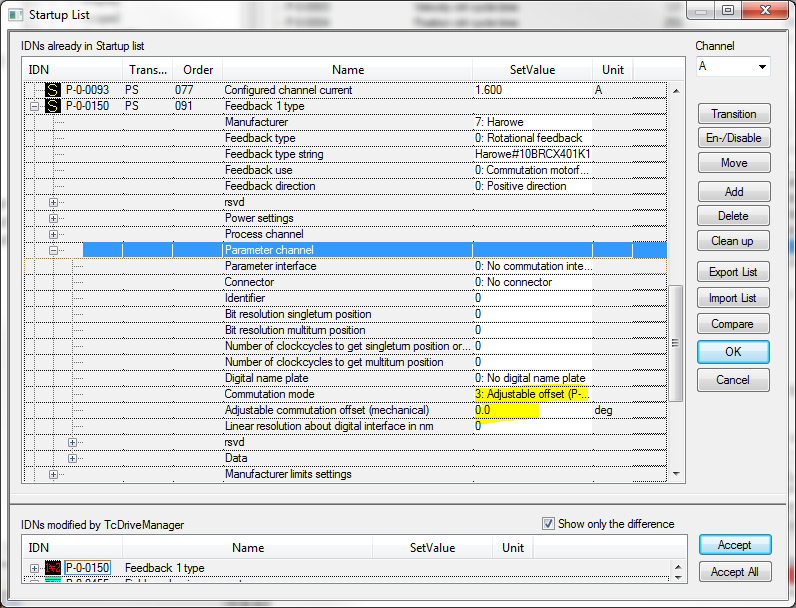
| 1.) Execute command P-0-0160. 2.) Press the "Download" and "Start" buttons. Wait until the "Suceeded to start the command" appears. 3.) You get a new value in parameter P-0-0058 "Mechanical commutation offset". Remember this value. 4.) Open the "Startup List". Open the parameter structure P-0-0150. Open "Parameter Channel": 5.) Set the parameter P-0-0150 "Feedback 1 Type" in "Commutation mode" to: 3 Adjustable offset. |
| 6.) Change the value in P-0-0150 "Feedback 1 Type" in the "Adjustable commutation offset (mechanical)" to the value which you have previously read out in the parameter P-0-0058. Confirm with OK and activate the configuration in the TwinCAT System Manager. |
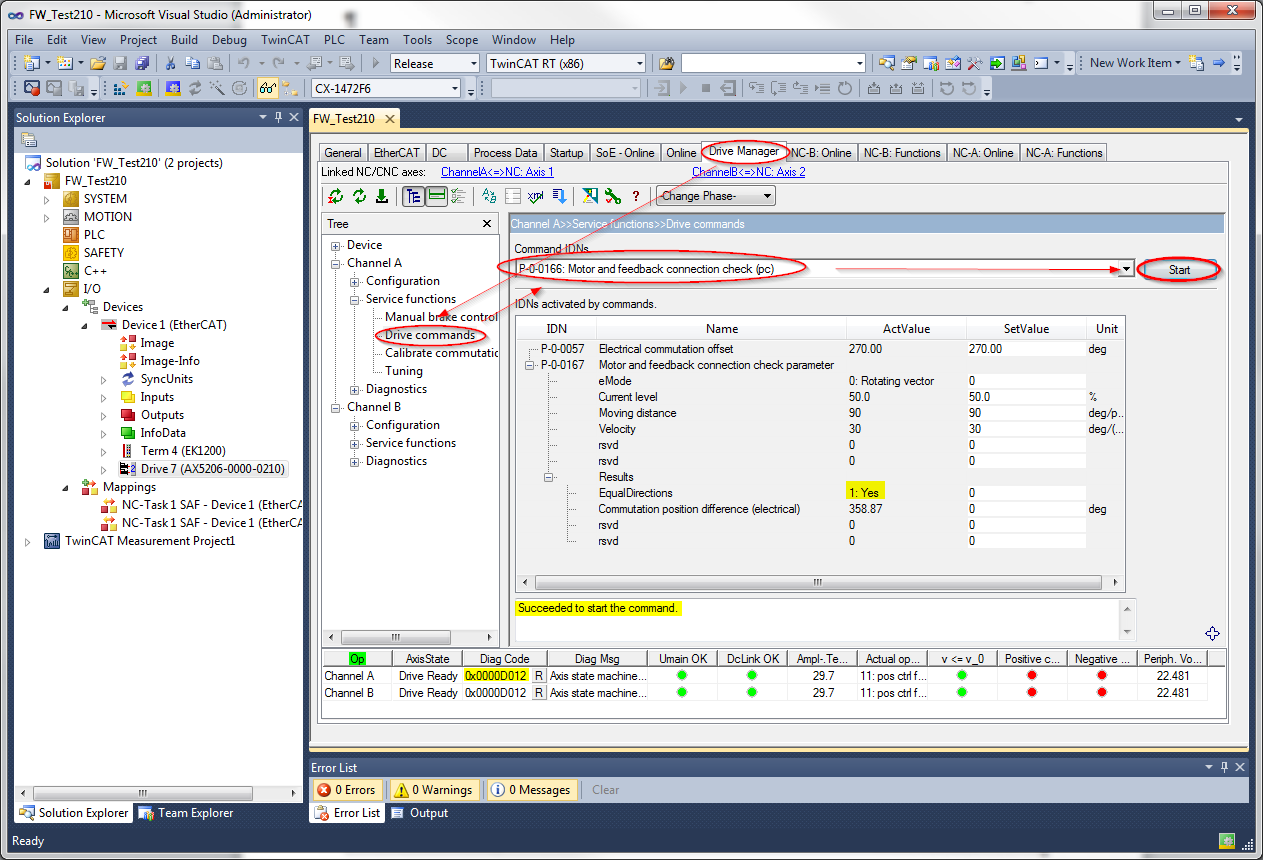
| 7.) Switch to the "Drive Commands" tab and execute the command P-0-0166 "Motor and feedback connection check".
8.) Leave the default values and confirm with Start. If the message "Suceeded to start the command" appears, open the parameter structure of the P-0-0167 "Results". "Equal direction" must be "Yes" and "Commutation position difference" must be between 355° and 360° (0° ... 5°).
|
| |
Motor movement! If you execute the command P-0-0160 or P-0-0166, the motor performs a movement. Therefore, please keep a safe distance from the motor with all body parts before you start the command P-0-0160 or P-0-0166! |
