Determining the electrical commutation offset
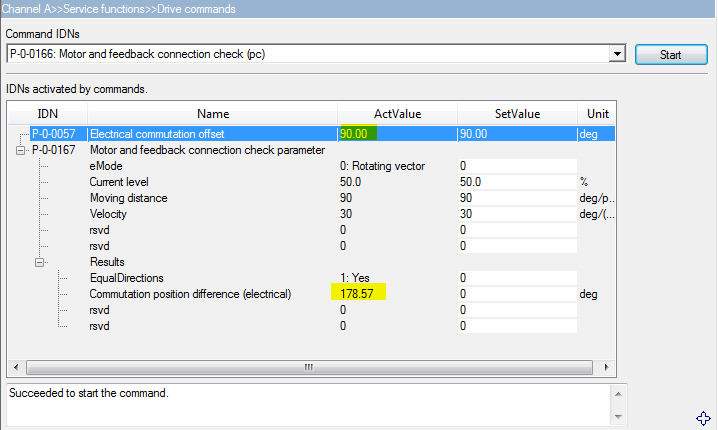
| Execute the command P-0-0166 (see section “Checking the direction of rotation”). To determine the commutation offset we need the current value from parameter P-0-0057 and the current value from parameter P-0-0167: Read the value for “Commutation position difference”. Subtract this value from the value in P-0-0057 “Electrical commutation offset”. If the result is positive, this is the new value for P-0-0057. If the result is negative, add 360°. Sample: 90° - 178.57° = -88.57° -88.57° + 360° = 271° (fractions can be neglected.) |
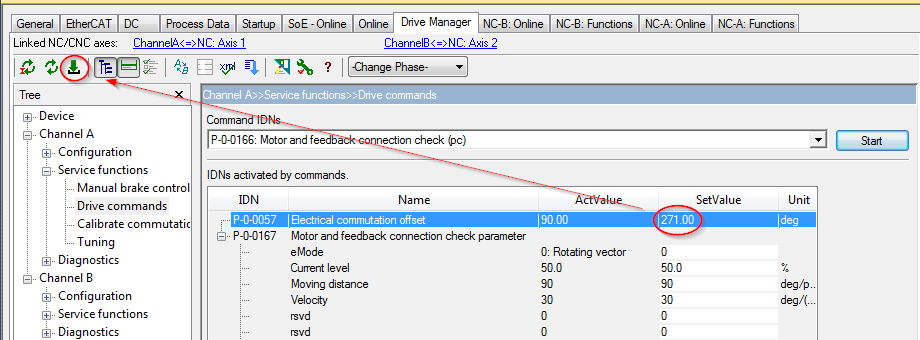
| The result is the new value for P-0-0057 “Electrical commutation offset”. Enter the value at SetValue and confirm with <Enter>. Confirm the message that is displayed with <Yes>. Pressing the download button (red circle) activates the new value immediately. The value is displayed in the setting “ActValue” after the download is complete. Execute command P-0-0166 again! The value for “Commutation position difference” should now lie within the range: 355 … 360 = 0 … 5.
If this value is displayed you have successfully completed the commutation search! The offset value has already been adopted into the startup list with the download button. |
| To use the commutation angle, the “Commutation mode” must be changed in parameter P-0-0150: Change the entry “Commutation mode” to “3:Adjustable offset”. Then reactivate the TwinCAT configuration. After changing the “commutation mode” once, this method has the advantage (compared with the mechanical offset) that the offset (P-0-0057) can be changed at any time without having to restart the system. |
