Determination of the control loop parameters
The determination of the control loop parameters of a linear motor axis is done in the same way as with a standard axis. For that reason only an abridged procedure is described here.
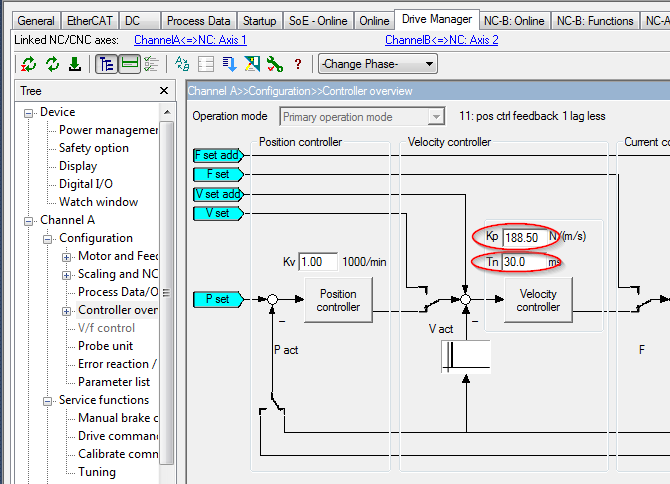
In most cases the preset proportional gain in the velocity/speed controller is much too small. This is set in relation to the motor mass. In particular in the case of linear motors, the external mass can be large in comparison with the motor mass. This case requires a significant enlargement of Kp.
Abridged procedure:
- Set Tn to ≥ 30ms (to reduce oscillation of the axis).
- Start a reversing function at a moderate speed.
- While the axis is moving, increase Kp in the "Controller Overview" window in steps of, for example, 20% up to the oscillation limit. (It is possible to check by axis noise).
- Reduce Kp by about 20% until the oscillation reliably stops.
- Also check that the axis doesn’t oscillate when it is at a standstill.
- Reduce Tn
A value of between 5 ms and 10 ms is useful if the load is coupled normally.
The value must be increased if oscillations occur. - Kv = 1 in the position controller is usually okay. Reduce Kv (for example to 0.5) if the axis overshoots the position after optimizing the velocity controller.
Kv can also be increased if an overly large lag error occurs.