Checking the linear encoder
Once the motor and feedback have been selected and the scaling factor has been entered, the configuration must be activated. Subsequently the measuring system must be checked. The AX5000 must not report any feedback error when doing this. Please observe the notes in the section “Troubleshooting”.
Observe the position in the NC. Push the motor by hand during this procedure. The distance by which the motor is pushed must be correctly displayed in the NC.
If a measuring system is used that can read out absolute and incremental signals, then the absolute and incremental tracks must have the same counting direction. Therefore, the two tracks have to be compared beforehand. The absolute position is read by the AX5000 only when switching on/restarting. Then it switches over and evaluates only the incremental information (sincos or TTL signals).
Important: Up to this step the counting direction should not be inverted via a parameter at any point!
Now push the motor by hand. While doing this, observe the direction in which the position increases. Switch the AX5000 to the "Init" state and then to the "Op" state (picture below). Using this procedure the absolute position is read out again.
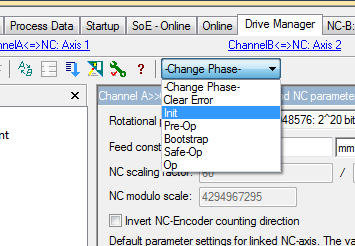
Note the absolute position read out. Now push the motor in the direction of the increasing position. Then switch the AX5000 once again to the "Init" state and then to the "Op" state (picture below). If the absolute position displayed after this procedure is larger than the one noted beforehand, both tracks are counting in the same direction.
If a smaller position is displayed, the counting direction for the incremental encoder signals must be reversed. This should be done by hardware means, for example by swapping the SIN+ and REFSIN signals in the feedback connector.
Now repeat the test!
 | Counting direction doesn’t correspond to the application! If the counting direction of the linear encoder doesn’t correspond to the desired counting direction in the application, this can be ignored at this point. The necessary settings can be made at the end of the commissioning. The requirement for this is that the motor drives without errors. |