Checking the motor connection and feedback
The motor can execute a defined movement independently of the feedback on the basis of command P-0-0166. If the movement is observed (e.g. with the software oscilloscope), conclusions can be drawn about the feedback settings.
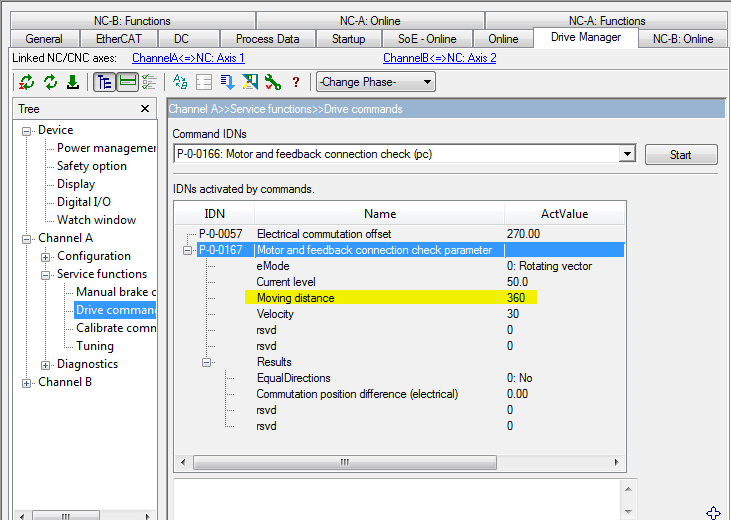
Enter a value of 360 degrees in parameter P-0-0167 in the setting “Moving distance”. On execution of P-0-0166 the motor is then moved by one electrical revolution. In the case of linear motors this corresponds to one pole pair distance. Since the motor executes an undefined movement before that, it is a good idea to record the complete movement with the software oscilloscope.
The following signals should be recorded:
- Torque Feedback (S-0-0084)
- Position feedback value 1 (S-0-0051)
- ActPos (from the NC)
If the motor doesn’t move by the expected pole pair distance, check the value entered in parameter P-0-0125 (Pole pair distance).
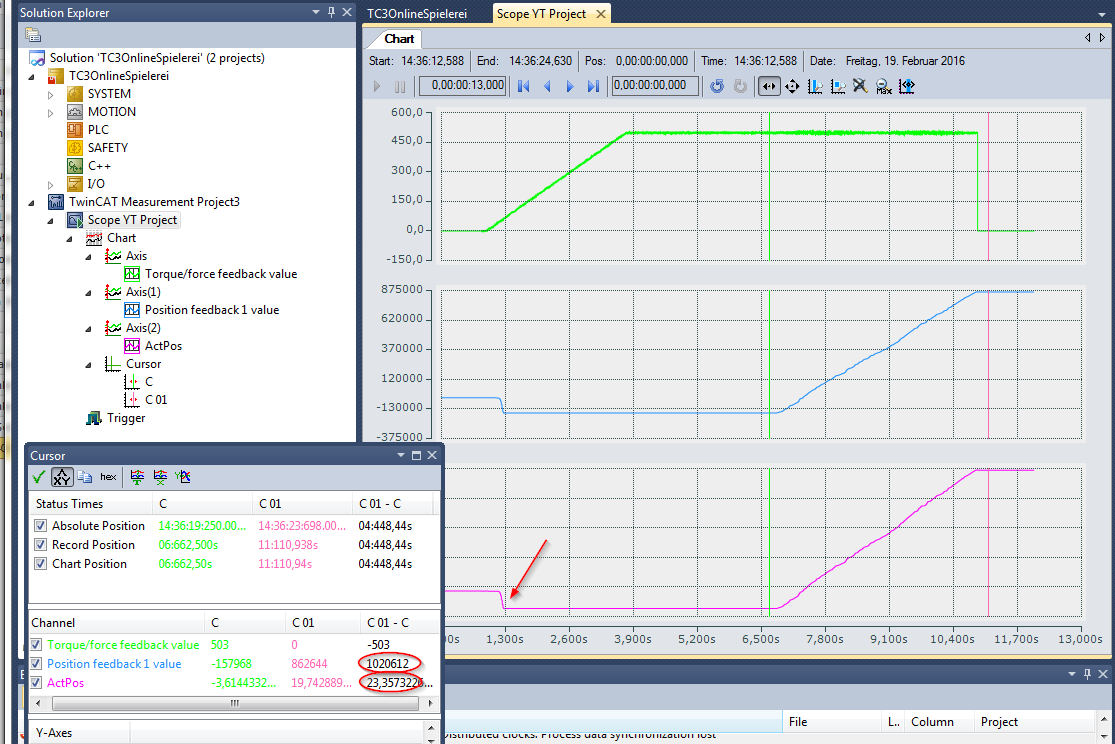
The jerky movement at the beginning (picture above → red arrow) is not included in the observation. The motor aligns itself via the poles.
From the current curve it can be seen that the value initially ramps up and is then kept constant for a while. During that time the direction is electrically turned once. The value set in parameter S-0-0051 should increase by approx. 220 (1048576) increments. The NC position (ActPos) should increase by the value of a pole pair distance. In the example the values are sufficiently precise with 1020612 and 23.357.
If the increase of S-0-0051 differs considerably from 220, the resolution of the linear encoder has not been entered correctly.
If S-0-0051 proceeds correctly but ActPos displays a wrong difference, the scaling factor has been set incorrectly.
The connection of the motor phases must be checked if the movement does not proceed evenly, but only a jump takes place, for example.