Error F4A5 "SoE Communication Parameter Error"
The parameter that caused error F4A5 is output in parameter S-0-0021 (picture below). This can be read in the Diagnostics window.
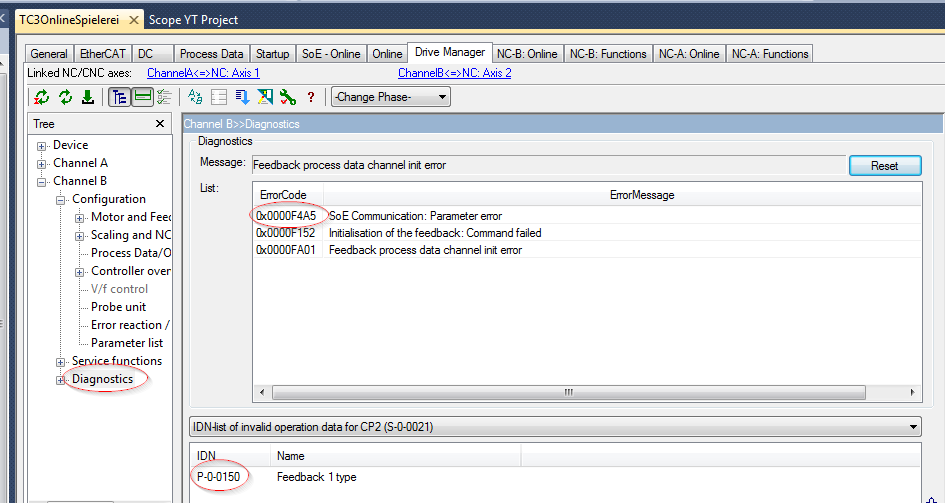
In this case F152 and FA01 are consequential errors of F4A5. The cause of the error is an incorrect setting in parameter P-0-0150.
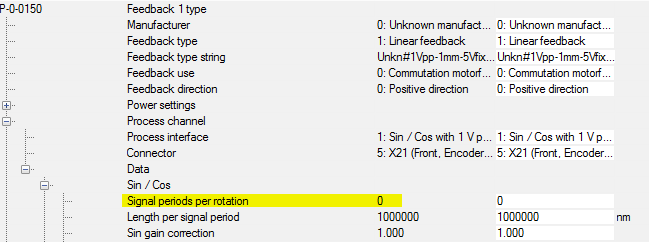
A value > 0 must be entered for "Signal periods per rotation" (picture above). This takes place automatically if, during the configuration, the motor is selected first and then the feedback.
The correct value is the pole pair distance / ("Length per signal period")
Sample:
Signal periods per rotation = 24mm / 1000000nm = 24
The error message F4A5 can also occur with a reference to parameter S-0-0113 "Maximum motor speed":
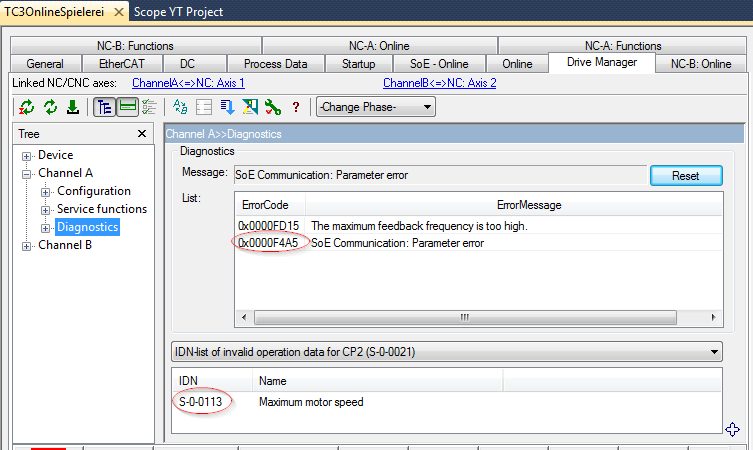
In this case the additionally occurring error message FD15 allows a conclusion to be drawn about the cause: the selected measuring system and the maximum velocity configured in S-0-0113 result in a too high input frequency at the encoder input (X11/X21).
Sample:
Measuring system with 20 µm signal period. Maximum travel speed of the motor = 12 m/s.
12 m/s : 20µm = 1000000 1/s = 1 MHz
The max. permissible input frequency for sine/cosine signals at X11/X21 is 250 kHz.
Remedy: Reduce the value of S-0-0113. The maximum possible speed of the motor is required only in very few applications.
Note: The value of the max. speed is shown in the parameter list in rpm. In the case of linear motors 1 rpm is one pole pair distance per minute.

Conversion of the displayed value for a motor with a pole pair distance of 24 mm:
30000rpm * 0.024m / 60 = 12 m/s
 | Further information can be found in the parameters: S-0-0021 and P-0-0150. |