Motor types and operation modes
In this chapter the relationships between physical motor types, feedback systems and the necessary operation mode will be explained.
Functionality from firmware v2.12
The firmware V2.12 enables the operation of voice coil motors with feedback system and (a)synchronous servomotors with and without feedback (sensorless regulation).
Structure of the parameter P-0-0050 (Motor construction type)

The functional principle of the motor
(asynchronous/synchronous) and the type of construction (rotary/linear) are defined in this parameter.
Structure of the parameter P-0-0451 (Current controller settings)
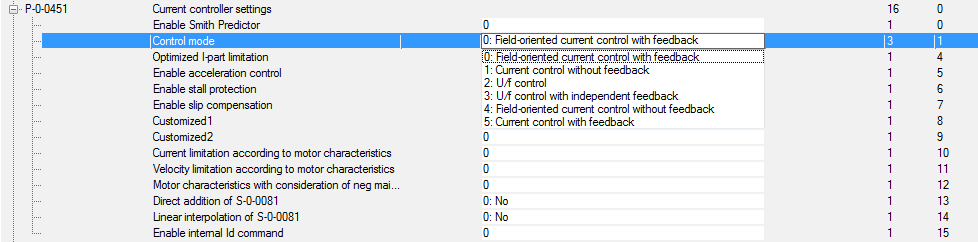
In Control mode the operation mode is selected in relation to the predetermined
motor type (P-0-0050)
.
Please refer
to the table below
for the relationships.
Relationships between motor type and operation mode
Case | Motor type | Settings in P-0-0050 | Settings in P-0-0451 |
|---|---|---|---|
1 | Rot. synchronous servomotor with feedback | Functional principle = 0: synchronous Construction = 0: rotary Functional principle replacement = 0 (Default) | Control mode = 0: Field-oriented current control with feedback |
2 | Linear synchronous servomotor with feedback | Functional principle = 0: synchronous Construction = 1: linear Functional principle replacement = 0 (Default) | Control mode = 0: Field-oriented current control with feedback |
31) | Rot. synchronous servomotor without feedback | Functional principle = 0: synchronous Construction = 0: rotary Functional principle replacement = 0 (Default) | Control mode = 4: Field-oriented current control without feedback |
4 | Rot. asynchronous servomotor with feedback | Functional principle = 1: asynchronous Construction = 0: rotary Functional principle replacement = 0 (Default) | Control mode = 0: Field-oriented current control with feedback |
52) | Rot. asynchronous servomotor without feedback | Functional principle = 1: asynchronous Construction = 0: rotary Functional principle replacement = 0 (Default) | Control mode = 2: U/f control or Control mode = 3: U/f control with independent feedback |
63) | Rot. voice coil servomotor with feedback | Functional principle = 0: synchronous Construction = 0: rotary Functional principle replacement = 1: VoiceCoil | Control mode = 5: Current control with feedback |
73) | Linear voice coil servomotor with feedback | Functional principle = 0: synchronous Construction = 1: linear Functional principle replacement = 1: VoiceCoil | Control mode = 5: Current control with feedback |
1): Mandatory setting in parameter P-0-0464 = Mode: 1: EMF-based observer.
2): With an asynchronous servomotor and the operation mode V/f control with independent feedback (setting in P-0-0451), an independent encoder can also be read. An encoder error does not affect the operation of the motor.
3): As soon as you select a voice coil motor in parameter P-0-0050 the range in Functional principle (synchronous / asynchronous) will be overwritten.
Functionality from firmware v2.06 to firmware v2.10
The firmware versions v2.06 - v2.10 allow the operation of synchronous servomotors with feedback and asynchronous servomotors without feedback.
Structure of the parameter P-0-0050 (Motor construction type)

The functional principle of the motor
(asynchronous/synchronous) and the type of construction (rotary/linear) are defined in this parameter.
Structure of the parameter P-0-0451 (Current controller settings)
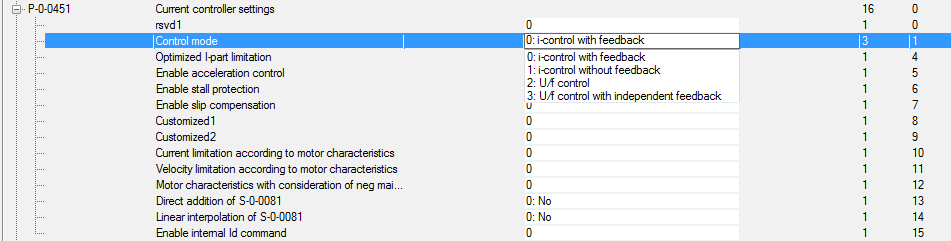
In Control mode the operation mode is selected in relation to the predetermined
motor type (P-0-0050)
.
Please refer
to the table below
for the relationships.
Relationships between motor type and operation mode
Case | Motor type | Settings in P-0-0050 | Settings in P-0-0451 |
|---|---|---|---|
1 | Rot. synchronous servomotor with feedback | Functional principle = 0: synchronous Construction = 0: rotary Functional principle replacement = 0 (Default) | Control mode = 0: Field-oriented current control with feedback |
2 | Linear synchronous servomotor with feedback | Functional principle = 0: synchronous Construction = 1: linear Functional principle replacement = 0 (Default) | Control mode = 0: Field-oriented current control with feedback |
3 | Rot. asynchronous servomotor without feedback | Functional principle = 1: asynchronous Construction = 0: rotary Functional principle replacement = 0 (Default) | Control mode = 2: U/f control or Control mode = 3: U/f control with independent feedback |
4 | Rot. asynchronous servomotor without feedback | Functional principle = 0: synchronous Construction = 0: rotary Functional principle replacement = 0 (Default) | Control mode = 4: Field-oriented current control without feedback |
5 | Rot. asynchronous servomotor with feedback | Functional principle = 1: asynchronous Construction = 0: rotary Functional principle replacement = 0 (Default) | Control mode = 0: Field-oriented current control with feedback |