Functional description
 | Data backup! Beckhoff Automation GmbH & Co. KG recommends that you make a backup of your TwinCAT project and the data of your configuration before executing the function. |
Step 1
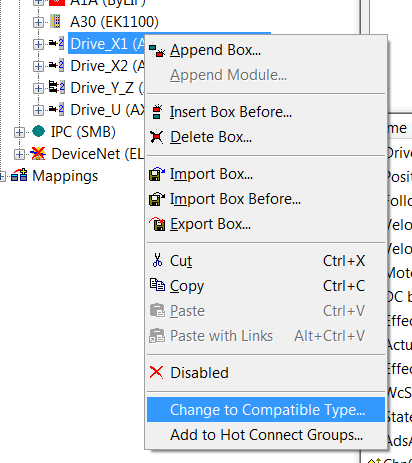
- Right-click on a created servo drive (in our example Drive_X1) in the I/O configuration.
- Select the Change to Compatible Type function in the context menu.
Step 2
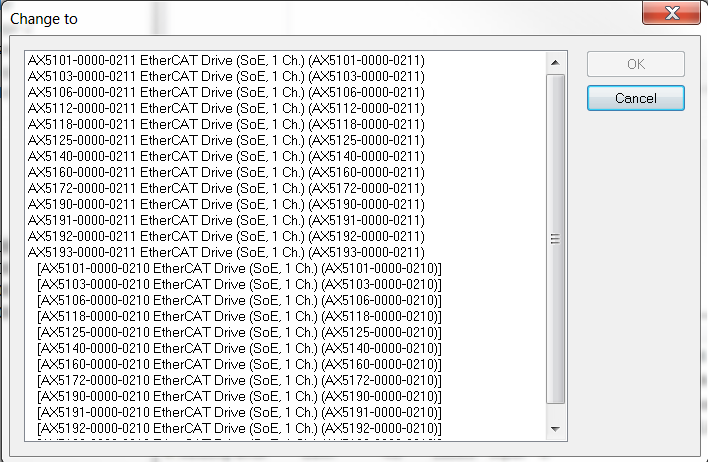
A list appears showing the compatible servo drives that are suitable for the execution of the Change to Compatible Type function.
- Select a suitable servo drive from the list (Step 2).
- Confirm with "OK"
- In the next step, start the function by left-clicking on "OK".
| Use of the Change to Compatible Type function. Only servo drives with identical hardware conditions (HW1 or HW2) and the same number of channels (1- or 2-channel devices) can be updated or changed. |
Step 3 | Step 4 |
The following settings are now changed for the selected servo drive in the TC Drive Manager:
| Once steps 1 – 4 have been completed, the changes are adopted into the startup list in parameter P-0-0010. These are then compared with the Beckhoff-AX5xxx.xml defined standard configurations. |
| Aborting and restarting the function! It is possible at all times to stop and restart the function.
|