Parameterization of the filter
| |
Warning, risk of injury from uncontrolled movements! Impermissible damping values lead to a strong phase shift, which can result in uncontrolled acceleration of the motor and other instable states. |

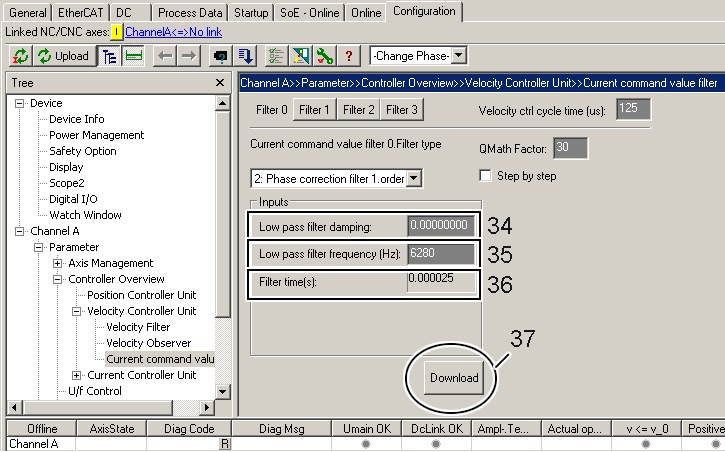
This filter is parameterized with the parameters "Low pass filter frequency" (35) and "Damping" (34). The filter time(s) (36) is calculated from the low pass filter frequency according to the following equation --> "Filter time(s) [s] = 1/ (2*Pi*cut-off frequency [Hz])".
Determining the low pass filter frequency
The following test provides information about any interference frequencies that may be present: Run through the required operating velocity range and make a scope recording of the actual active current (IDN S-0-0084). A frequency analysis shows possibly existing resonance points.
Click on the "Download" button (37) to conclude the parameterization. If you are online, these parameters are loaded directly into the AX5000 and activated. If you are offline, they are only written into the start-up list.
The limitation of the damping of the amplitude ensures that the phase shift returns to zero. The limited damping is adequate for most drive applications.
Example:
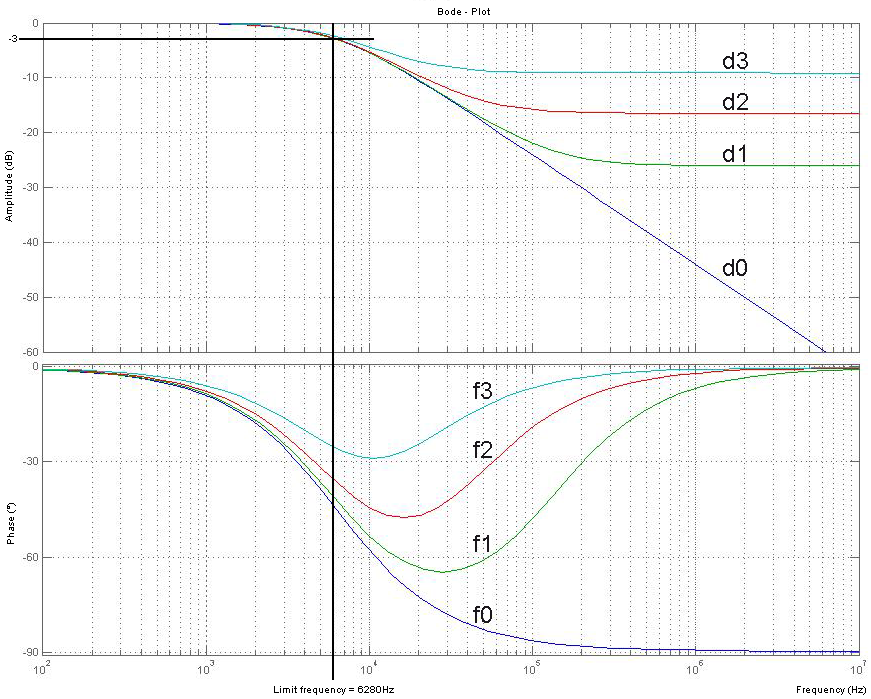
With this example the frequency response of the PT1 filter has been illustrated for clarity. The Bode plot (logarithmic frequency curve) shows the amplitude over frequency in the upper area and the associated phase shift over frequency in the lower area. Seen together, it is recognizable that a phase shift results from the damping of the amplitude.
Parameter inputs in the TCDriveManager:
Filter time(s) = 0.000025 s
(low pass filter frequency = 6280 Hz)
Damping:
d0 = 0
d1 = 0.05
d3 = 0.15
d4 = 0.35
"Phase correction filter 1st order" – method – "step by step"
 | Expert hint! The software calculates the coefficients automatically based on the parameters entered. If you have sufficient experience in control technology, you can also determine the coefficients yourself and thus influence the behavior of the filter. |
The method is the same as in the "Notch filter classic method" – "step by step".