EtherCAT as drive bus
The option of being able to use EtherCAT both for drive applications and for fast I/O signals was one of its main developments aims right from the start. In former systems it has only been possible to implement short cycle times offering high synchronicity, as are required for control loops that are closed by the bus, with the aid of special "drive buses" such as CANopen.
Special drive technology requirements
- Cycle time
- Synchronicity
- Simultaneity
Typical values for the necessary cycle times lie between 1 and 4 milliseconds when position is specified cyclically, with position control in the drive. Drive technology frequently specifies a microsecond as an adequate requirement for synchronicity. Whereas the synchronicity specifies the temporal jitter in the processing of functions by the devices involved (drive and controller), simultaneity defines the size of the temporal delay involved with these functions. Synchronicity is important for the individual devices, so that their own subordinate control loops can synchronize with the cyclic signal with the required precision. Simultaneity moreover enables distributed devices to work on a common task with identical timebase.
Distributed clocks - Properties of the EtherCAT slave controller
To control synchronization, EtherCAT takes an approach based on what are known as "distributed clocks": All devices have an independent clock as a basis for running local cycles and events. The crucial factor is that all clocks run at the same speed and have the same base time. A special control integrated in the EtherCAT Slave Controller (ESC) ensures that all clocks are guided by a reference clock and are synchronized irrespective of temperature and production tolerances.
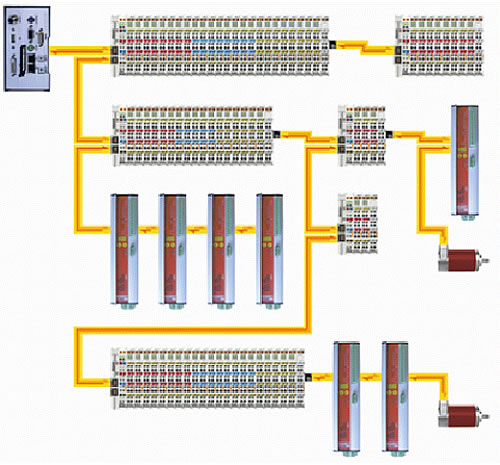
Topology
Line, tree, or star: EtherCAT supports almost any topology (see figure). The bus or line structure known from the field busses thus also becomes available for Ethernet. Particularly useful for system wiring is the combination of line and branches or stubs: the required interfaces exist on the couplers; no additional switches are required. Naturally, the classic switch-based Ethernet star topology can also be used.
Wiring flexibility is further maximized through the choice of different cables. Flexible and inexpensive standard Ethernet patch cables transfer the signals optionally in Ethernet mode (100Base-TX) or in E-bus signal representation. Plastic optical fibers (POF) complement the system for special applications. The complete bandwidth of the Ethernet network - such as different optical fibers and copper cables - can be used in combination with switches or media converters. The Fast Ethernet physics enables a cable length of 100 m between two devices, the E-bus line is intended for distances of up to 10m. For each cable distance, the signal variant can be selected individually. Since up to 65535 devices can be connected, the size of the network is almost unlimited.