Requirements
The following conditions must be satisfied in order to operate a servo drive from the AX2000 series on EtherCAT.
Hardware
Servo drive
 | The AX2090-B110 interface card allows servo drives from the AX2000 series, with serial numbers of 780 266 0000 and above, to be used. |
The hardware status is printed on the interface board and can be read through the ventilation slots on the top side of the servo drive.
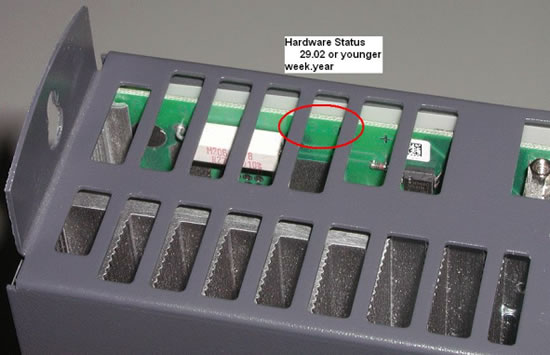
The hardware status, firmware version and serial number can also be displayed by the Commissioning software for the AX2000 (Drive.exe, "DriveTool").
| A firmware version of 6.78 or above must be installed on the servo drive! |
EtherCAT AX2090-B110 interface card
|
|
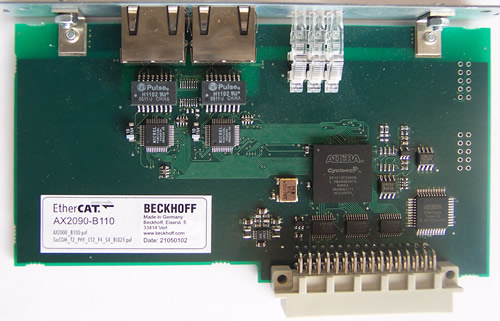
The FPGA fitted on the AX2090-B110 interface card must be of Build 22 or higher.
The interface card's FPGA version can be displayed by the TwinCAT System Manager:
TwinCAT
| You require TwinCAT 2.10 (Build 1313 or above) to be able to communicate with the AX2090-B110 interface card. |

Network card
In addition, the TwinCAT EtherCAT driver in your PC requires an Ethernet card with an Intel chipset.