SetParameterGeneral()
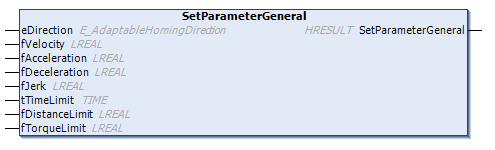
Eine allgemeine Reihe von Fahr-Parametern für die Homing-Prozedur wird gesetzt.
Syntax:
METHOD SetParameterGeneral : HRESULT
VAR_INPUT
eDirection : E_AdaptableHomingDirection;
fVelocity : LREAL;
fAcceleration : LREAL;
fDeceleration : LREAL;
fJerk : LREAL;
tTimeLimit : TIME;
fDistanceLimit : LREAL;
fTorqueLimit : LREAL;
END_VAR Rückgabewert
Rückgabewert
Name | Typ | Beschreibung |
|---|---|---|
SetParameterGeneral | HRESULT | Rückgabewert mit Feedback zum Erfolg der Ausführung. |
 Eingänge
Eingänge
Name | Typ | Beschreibung |
|---|---|---|
eDirection | E_AdaptableHomingDirection | Die Bewegung, mit der das Homing-Ereignis gefunden wird. |
fVelocity | LREAL | Die Geschwindigkeit der Bewegung, die bei der Suche des Homing-Ereignisses verwendet wird. |
fAcceleration | LREAL | Die Beschleunigung der Bewegung, die bei der Suche des Homing-Ereignisses verwendet wird. |
fDeceleration | LREAL | Die Verzögerung der Bewegung, die bei der Suche des Homing-Ereignisses verwendet wird. |
fJerk | LREAL | Der Ruck der Bewegung, der bei der Suche des Homing-Ereignisses verwendet wird. |
tTimeLimit | TIME | Die Timeout-Grenze der CoreFunction. |
fDistanceLimit | LREAL | Der maximale Weg, der bei der Suche des Homing-Ereignisses zurückgelegt werden darf. |
fTorqueLimit | LREAL | Die Begrenzung des Drehmoments, das bei der Suche nach dem Homing-Ereignis angewendet wird. |
 | Momentenbegrenzung bei einer mechanischen Blockierung Die Drehmomentbegrenzung dient dazu, Schäden zu vermeiden, falls die Achse auf eine mechanische Blockierung trifft, ohne das Homing-Ereignis erkannt zu haben. |
Voraussetzungen
Entwicklungsumgebung | Zielplattform | Einzubindende SPS-Bibliotheken |
|---|---|---|
TwinCAT v3.1.4024.35 | PC oder CX (x64, x86) | Tc3_PlasticFunctions v3.12.4.26 oder höher |