FB_AxisBase – Virtuelle Achsen
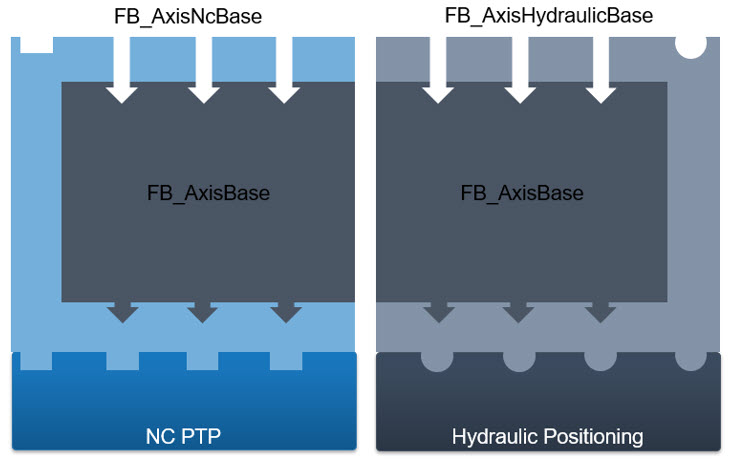
TwinCAT 3 Plastic Technology Functions definiert FB_AxisBase als eine virtuelle Basisachse. Diese stellt die Corefunctions bereit, die sowohl für elektrische als auch für hydraulische Antriebe benötigt werden. Durch die Definition ABSTRACT kann FB_AxisBase nicht instanziiert werden. Dies ist beabsichtigt, da die Verbindung zu spezifischen Motion Control Bibliotheken fehlt und einige Corefunctions erst in den spezifischen Ausbaustufen instanziiert werden.
Für elektrische Achsen wird FB_AxisNcBase und für hydraulische Achsen wird FB_AxisHydraulicBase von FB_AxisBase abgeleitet. Zum einen wird jeweils die Verbindung zu den MotionControl-Bibliotheken hergestellt. Zum anderen fügen spezielle Achstypen eigene Corefunctions für ihre Funktionsweise hinzu. Die folgende Abbildung zeigt, wie die Achs-Klassen (FBs) in TwinCAT 3 Plastic Technology Functions strukturell zu verstehen sind.
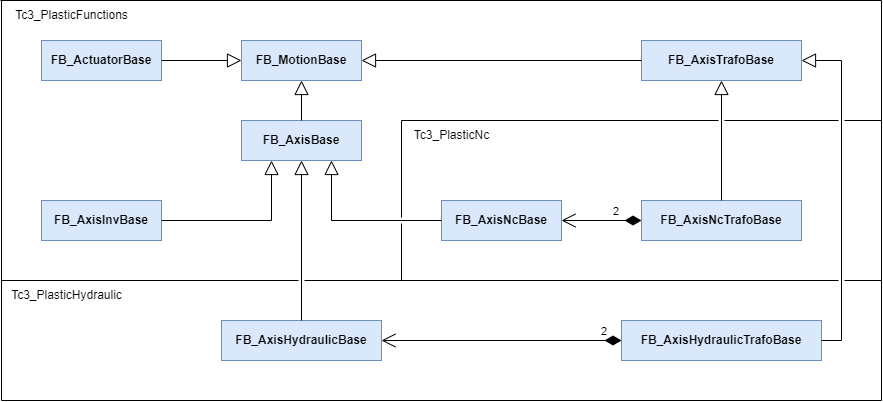
Weitere Bewegungsobjekte
Ergänzend zu dem Grundkonzept von NC-basierten und Hydraulik-basierten Achsen stellen die Plastic Technology Functions weitere Achs- und Bewegungstypen zur Verfügung. Dazu gehören Transformations- und Umrichterachsen sowie digitale Linear-Aktuatoren. Das folgende UML-Diagramm zeigt den Zusammenhang der einzelnen Typen und ihre Verfügbarkeit pro Bibliothek.