Konstruktion einer Transformationsachse
Eine Transformationsachse ist ein Containerobjekt, das die gleiche Schnittstelle wie eine Standard-Nc-Achse implementiert. Innerhalb dieses Objekts gibt es zwei lokale Standardachsobjekte mit den Namen Lastseite und Antriebsseite. Diese internen Objekte werden verwendet, um die spezifischen Anforderungen für das effektive Werkzeug und den Aktorteil zu erfüllen. Es gibt fast keinen Austausch zwischen dem Anwendungsprojekt und diesen internen Objekten, da die üblichen Interaktionen die Schnittstellen des Containerobjekts verwenden.
Verwendete Symbole
Symbol | Beschreibung |
|---|---|
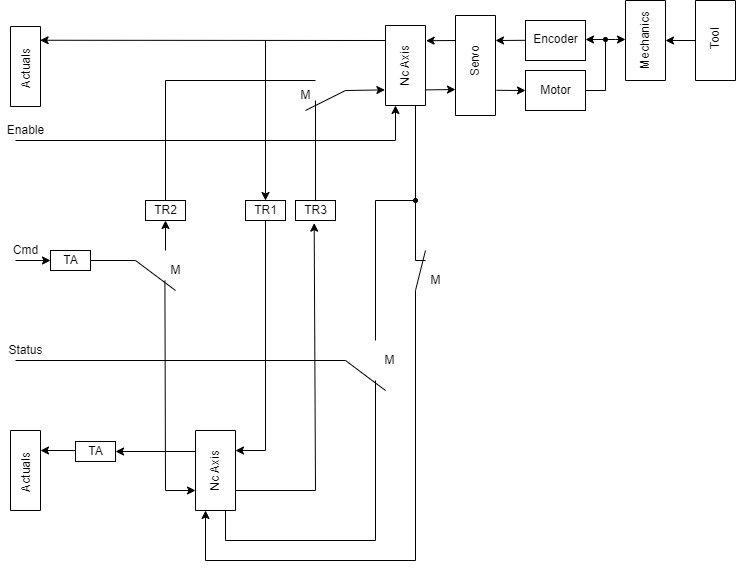
Actuals | Eine gemeinsame Kernfunktion, die Informationen über die aktuelle Situation der Achse enthält. Für die verschiedenen Achstypen gibt es alternative Unterversionen. |
TA: Tool Adaptation | Eine gemeinsame Kernfunktion, die verwendet wird, um die Unterschiede zwischen der Achse und dem effektiven Werkzeug zu behandeln. |
TRx: Transformation | Eine Kernfunktion, die spezifisch für das Transformieren von Achsen ist. Sie wird verwendet, um Istwerte der antriebsseitigen Achse in lastseitige Istwerte (TR1) und lastseitige Sollwerte (TR2) oder Sollwerte (TR3) in antriebsseitige Werte umzurechnen. |
MM: Operation mode select | In dieser Abbildung ist der "Vollständige Transformationsmodus" ausgewählt. |
Halbtransformationsmodus
In dieser Betriebsart werden alle Kommandos an die antriebsseitige Achse weitergeleitet. Um unerwartete Schleppfehler zu vermeiden, ist die lastseitige Achse nicht aktiviert.
Die Ist-Werte für Position und Geschwindigkeit der Lastseite werden anhand der umgerechneten Werte von der Antriebsseite aktualisiert.
Jede kommandierte Bewegung wird von der Antriebsseite unter Verwendung der umgerechneten Zielpositionswerte ausgeführt. Eine kommandierte Bewegung auf 100,0 führt dazu, dass das Werkzeug auf 100,0 mm verfahren wird, unabhängig davon, welcher Motorwinkel auf der Antriebsseite erforderlich ist.
 | Geschwindigkeit kann nicht umgerechnet werden Die kommandierte Geschwindigkeit kann nicht umgerechnet werden, da das Ergebnis von der Position abhängen würde. |
| Keine konstante Geschwindigkeit Da die Profilerzeugung von der antriebsseitigen Achse ausgeführt wird, fährt das Werkzeug nicht mit konstanter Geschwindigkeit. |
| Kein Camming der Position oder Geschwindigkeit Ein Camming der Position oder Geschwindigkeit wird nicht unterstützt. |
Volltransformationsmodus
In dieser Betriebsart werden fast alle Kommandos an die lastseitige Achse weitergeleitet. Durch die Aktivierung des Containerobjekts werden beide internen Achsen aktiviert.
Die Ist-Werte für Position und Geschwindigkeit der Lastseite werden anhand der umgerechneten Werte von der Antriebsseite aktualisiert.
Die Umwandlung erfolgt durch Konvertierung des Ergebnisses der Profilberechnung auf der Lastseite. Auch hier führt eine kommandierte Bewegung auf 100,0 dazu, dass das Werkzeug auf 100,0 mm verfahren wird, unabhängig davon, welcher Motorwinkel auf der Antriebsseite erforderlich ist.
| Konstante Geschwindigkeit Da die Profilerstellung von der lastseitigen Achse ausgeführt wird, fährt das Werkzeug mit konstanter Geschwindigkeit. |
| Überhöhte Geschwindigkeitswerte auf der Antriebsseite erforderlich In einigen Bereichen des Verfahrwegs können selbst niedrige Werkzeuggeschwindigkeiten überhöhte Geschwindigkeitswerte der Antriebsseite erfordern. |
| Vollständige Transformation vorübergehend unterbrochen Bei Jog- oder Homing-Kommandos wird die vollständige Transformation vorübergehend unterbrochen. Alle Positions- und Geschwindigkeitswerte werden gemäß den Definitionen auf der Antriebsseite ohne jegliche Umrechnung verwendet. |