Find Contour - Approximation Method
Dieses Beispiel beschäftigt sich mit den möglichen Annährungsmodi (eApproximationMethod vom Typ ETcVnContourApproximationMethod) bei der Konturensuche.
Erläuterung
Die Funktionen F_VN_FindContours, F_VN_FindContoursExp und F_VN_FindContourByHierarchy dienen zur Detektion von Konturen im Bild. Dabei werden die Konturen durch Punkte beschrieben. Je nach ausgewähltem Annäherungsmodus (eApproximationMethod vom Typ ETcVnContourApproximationMethod) werden alle Punkte je Kontur oder eine vereinfachte Punktmenge zurückgegeben:
- TCVN_CAM_NONE
alle Punkte der Kontur werden zurückgegeben - TCVN_CAM_SIMPLE
es erfolgt eine verlustfreie Komprimierung - TCVN_CAM_TC89_L1 oder TCVN_CAM_TC89_KCOS
wenden beide eine der Varianten des Teh-Chin-Kettenapproximations-Algorithmus an
Variablen
hr : HRESULT;
ipImageIn : ITcVnImage;
ipImageInDisp : ITcVnDisplayableImage;
ipImageRes : ITcVnImage;
ipImageResDisp : ITcVnDisplayableImage;
// Sample Specific Variables
ipContourList : ITcVnContainer;
ipContour : ITcVnContainer;
ipIterator : ITcVnForwardIterator;
eRetrievalMode : ETcVnContourRetrievalMode := TCVN_CRM_LIST;
eApproximationMethod : ETcVnContourApproximationMethod := TCVN_CAM_SIMPLE;
aOffset : TcVnPoint;
// Colors
aColorRed : TcVnVector4_LREAL := [255, 0, 0];Code
// Create Result Image
hr := F_VN_ConvertColorSpace(ipImageIn, ipImageRes, TCVN_CST_Gray_TO_RGB, hr);
// Find Contours and their Hierarchy
// -----------------------------------
hr := F_VN_FindContoursExp(
ipSrcImage := ipImageIn,
ipContours := ipContourList,
eRetrievalMode := eRetrievalMode,
eApproximationMethod := eApproximationMethod,
aOffset := aOffset,
hrPrev := hr);
// Draw the points of the contour
hr := F_VN_GetForwardIterator(ipContourList, ipIterator, hr);
WHILE SUCCEEDED(hr) AND_THEN ipIterator.CheckIfEnd() <> S_OK DO
hr := F_VN_GetContainer(ipIterator, ipContour, hr);
hr := F_VN_IncrementIterator(ipIterator, hr);
hr := F_VN_DrawPoints(ipContour, ipImageRes, ETcVnDrawShape.TCVN_DS_CIRCLE, aColorRed, hr);
END_WHILEErgebnisse
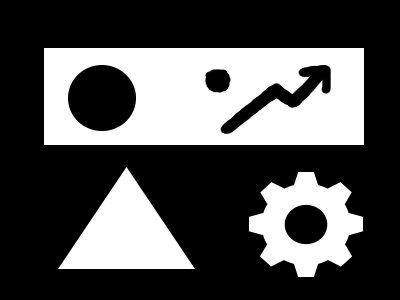
Das Eingangsbild
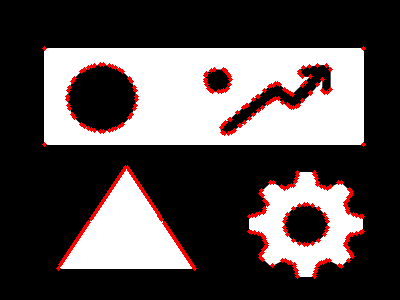
Das Ergebnisbild mit allen eingezeichneten Punkten nach ETcVnContourApproximationMethod.TCVN_CAM_NONE
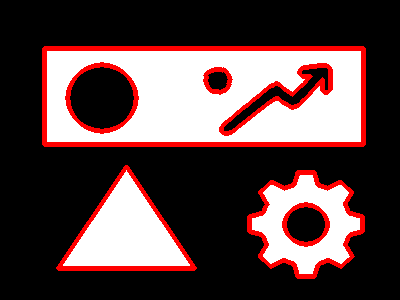
Das Ergebnisbild mit allen eingezeichneten Punkten nach ETcVnContourApproximationMethod.TCVN_CAM_TC89_L1