Übersicht
TwinCAT bietet als Echtzeit-Softwareumgebung die Möglichkeit, sich in Takt/Frequenz und gegebenenfalls auch Absolutzeit auf eine äußere vorgegebene Zeit aufzusynchronisieren. In der Regel erfolgt der Zeitzugang über den Feldbus EtherCAT und die integrierte Distributed-Clocks-Funktionalität. Die externe Zeit kann auf verschiedenen Wegen in das TwinCAT-System übertragen werden:
Methode | Benötigte Geräte |
|---|---|
IEEE 1588, PTP | EtherCAT-Klemme EL6688 |
EtherCAT <-> EtherCAT | EtherCAT-Klemme EL6692, EL6695 |
Beliebiger Takt als elektrisches Signal | EtherCAT-Klemme EL1252 (in diesem Dokument beschrieben) |
Weitere Methoden: Siehe Beckhoff Information System | |
Die TwinCAT 3 Function EtherCAT External Sync erweitert den TwinCAT-EtherCAT-Master um die Möglichkeit zur Synchronisierung der Beckhoff-Echtzeit auf ein externes digitales elektrisches Taktsignal und stellt hierfür eine Bibliothek mit verschiedenen Funktionsbausteinen zur Verfügung. Das Signal ist an einer EtherCAT-Klemme EL1252 anzuschließen, sodass der Feldbus EtherCAT benutzt werden muss.
 | EtherCAT System-Dokumentation Weitere Hinweise zur externen Synchronisierung finden Sie im Beckhoff Information System im Abschnitt Feldbuskomponenten > EtherCAT-Klemmen > EtherCAT System-Dokumentation |
Anwendungsbeispiele
- Eine bereits bestehende Anlage soll zusätzlich mit einer Beckhoff TwinCAT‑Steuerung erweitert werden, die taktsynchron zur Hauptsteuerung laufen muss. An der Hauptsteuerung kann z. B. durch einen toggelnden 24V-Digitalausgang das Taktsignal generiert werden, das die TwinCAT‑Steuerung über die EL1252 aufnimmt. (Siehe Beispiele > EtherCAT External Sync)
- Eine TwinCAT‑Anlage soll generell synchron zu einem externen Takt laufen, z. B. Sekundenpuls (PPS, Pulse per second) oder Lokalzeit
- Eine TwinCAT-Anlage soll zusätzlich zum Takt mit der Absolutzeit versorgt werden. Wenn auf ein externes PPS-Signal auch eine Absolutzeit aufmoduliert wird, z. B. über eine DCF77-Codierung, kann die TF6225 in Verbindung mit einem SPS-Funktionsbaustein zur Decodierung des DCF77-Signals verwendet werden. Die Bausteine zum Codieren/Decodieren von DCF77 sind im Beispielprogramm enthalten. Andere Zeitcodierungen können in der SPS selbst implementiert werden. (Siehe Beispiele > DCF77)
Anwendungsfall der externen Synchronisation einer Systemumgebung (B) von einer nicht-veränderbaren Systemumgebung (A):
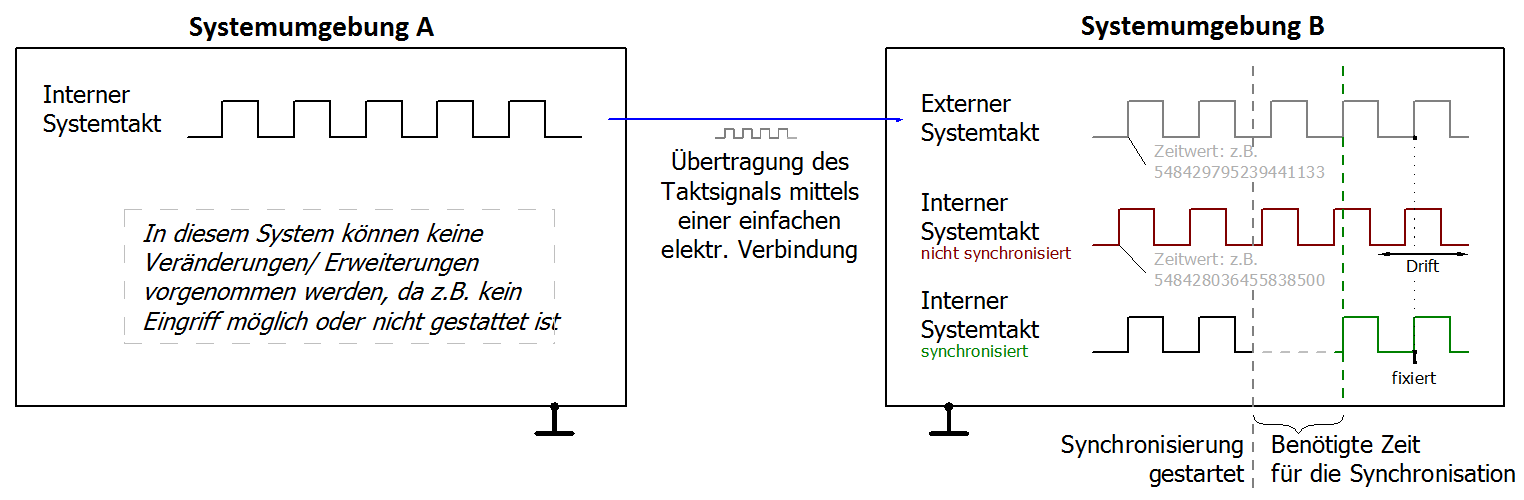
| In den nachfolgenden Abschnitten wird Systemumgebung (A) als Master-System (Hersteller beliebig) und Systemumgebung (B) als Slave-System (ausschließlich TwinCAT) betrachtet. |