EBufferMode
Buffer mode between buffered commands.
Syntax
Definition:
TYPE EBufferMode :
(
Aborting := 0,
Buffered := 1
)UINT;
END_TYPEValues
|
Name |
Description |
|---|---|
|
Aborting |
The previous command is aborted and a transition to the new command is initiated immediately. |
|
Buffered |
The previous command is executed to completion. The new command affects the motion object as soon as the previous movement is 'Done'/'InVelocity'/'InSync'/'InGear'. There is no blending. |
Weiterführende Informationen
Der Datentyp EBufferMode wird bei Fahrkommandos verwendet, um festzulegen, wie diese das vorherige Fahrkommando ablösen.
Aborting
Das vorherige Kommando wird sofort abgebrochen und signalisiert CommandAborted = TRUE. Sind für das neue Kommando höhere Dynamiken parametriert, werden diese instantan als Limit für die Achsbewegung übernommen.

Sind für das neue Kommando geringere Dynamiken parametriert, kann es zu einer Übergangsphase kommen. Die Achse wird so schnell wie möglich in den Zielzustand bzw. in den Bereich der neuen Dynamiklimits überführt, wobei Über- oder Unterschwinger unterdrückt werden (z. B. das Überschwingen über die Zielposition des vorherigen Kommandos). Ist dies auch mit den verringerten Dynamiken möglich, werden diese instantan übernommen. Andernfalls wird die Achse mit den höheren Dynamiken des vorherigen Kommandos abgebremst. Diese Bremsphase ist aktiv, bis die Bewegung in Richtung des Zielzustands gerichtet ist.
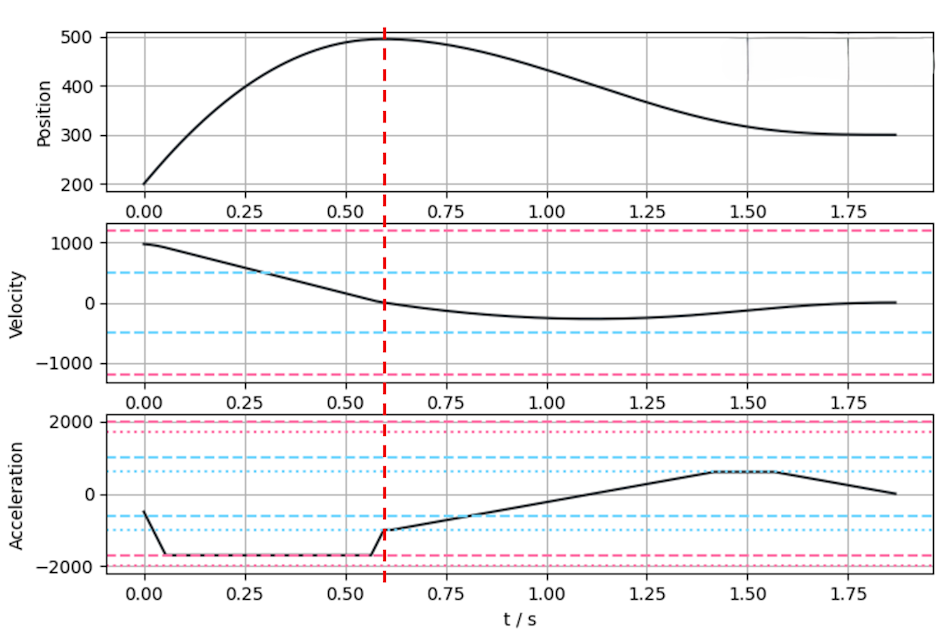
Die nachstehende Abbildung zeigt eine Umkehrbewegung. Die ursprüngliche Zielposition ist 500, das Aborting-Kommando ist mit geringeren Dynamikparametern und einer Zielposition von 300 parametriert. Würde die geringeren Dynamiken instantan übernommen, würde zum einen die ursprüngliche Zielposition von 500 überschritten. Zum anderen würde sich die Achse weiter von ihrem neuen Zielzustand entfernen. Bis zur roten senkrechten Markierung sind die höheren Dynamiken des vorherigen Kommandos aktiv. Aus Sicht des neuen Kommandos wird der Überschwinger in Bezug auf Position 300 und unter Beachtung der Kommandodynamiken so gering wie möglich gehalten. Zudem wird die ursprüngliche Zielposition nicht überschritten.
Buffered
Das vorherige Kommando wird bis zum Ende ausgeführt. Der neue Befehl wirkt sich auf das Bewegungsobjekt aus, sobald die vorherige Bewegung abgeschlossen ist (Done / InVelocity / InSync / InGear). Es erfolgt keine Überblendung.

Versionsinformation
- TwinCAT Standard >= v3.1.4026.23.1
- TF5500 MC3 Base >= v4.0.6