MC_Halt

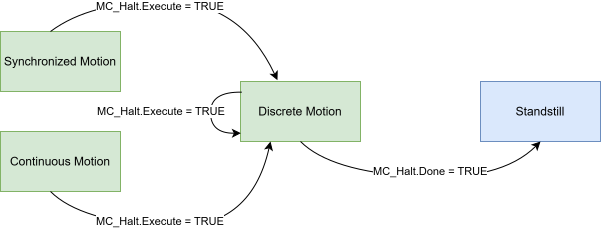
This function block commands a motion stop. The axis is transferred to the state DiscreteMotion, until zero dynamics is reached.
Syntax
Definition:
FUNCTION_BLOCK MC_Halt
VAR_IN_OUT
Axis : Reference To AXIS_REF;
END_VAR
VAR_INPUT
Execute : BOOL;
Deceleration : LREAL;
Jerk : LREAL;
END_VAR
VAR_OUTPUT
Done : BOOL;
Busy : BOOL;
Active : BOOL;
CommandAborted : BOOL;
Error : BOOL;
ErrorId : UDINT;
END_VAR
 Inputs
Inputs
|
Name |
Type |
Default |
Description |
|---|---|---|---|
|
Execute |
BOOL |
|
Trigger the command with rising edge. |
|
Deceleration |
LREAL |
#Default |
Maximum deceleration ([PosUnit]/s^2, positive) |
|
Jerk |
LREAL |
#Default |
Maximum jerk ([PosUnit]/s^3, positive) |
 Outputs
Outputs
|
Name |
Type |
Description |
|---|---|---|
|
Done |
BOOL |
Zero dynamics has been reached, axis state is transferred to Standstill. |
|
Busy |
BOOL |
Function block is not finished and new output values are to be expected. |
|
Active |
BOOL |
Function block has active control on the axis. |
|
CommandAborted |
BOOL |
Command is aborted by another command. |
|
Error |
BOOL |
Error occurred within function block. |
|
ErrorId |
UDINT |
Error identifier |
Weiterführende Informationen
Mit dem Funktionsbaustein MC_Halt wird eine Achse mit einer definierten Bremsrampe angehalten.
Im Gegensatz zum MC_Stop wird die Achse nicht gegen weitere Bewegungskommandos verriegelt. So kann das MC_Halt-Kommando sowohl während der Bewegungsrampe als auch im Anschluss durch ein anderes Bewegungskommando abgelöst werden.
Wird MC_Halt auf eine gekoppelte Slave-Achse angewendet, so führt dieses zum automatischen Abkoppeln der Achse und anschließendem Ausführen des Halt-Kommandos.
Auswirkungen auf den Achszustand
Hinweis zum Umstieg von NC2 zu MC3
Der MC3 Funktionsbaustein MC_Halt hat im Gegensatz zum gleichnamigen NC2 Funktionsbaustein keinen Eingang, an dem der Buffermodus vorgegeben werden kann. Ein vorhergehendes Kommando wird bei der MC3 immer direkt vom MC_Halt abgelöst, was intern dem Buffermodus Aborting entspricht.
In der MC3 ist eine Parametrierung der Dynamiken mit dem Wert 0 (implizite Verwendung der zuletzt kommandierten Dynamiken) nicht möglich.
Versionsinformation
- TwinCAT Standard >= v3.1.4026.23.1
- TF5500 MC3 Base >= v4.0.6