Achsobjekt mit Hardware verknüpfen
Automatisches Anlegen und Verknüpfen einer Achse beim Scan der EtherCAT-Konfiguration
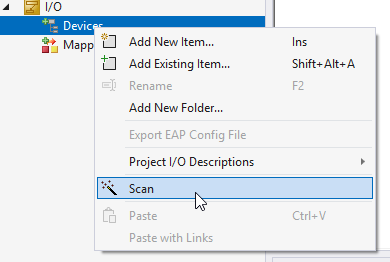
- 1. Scannen Sie die EtherCAT Feldbuskonfiguration: I/O Knoten > Devices > Kontext Menü (Rechtsklick) > Scan
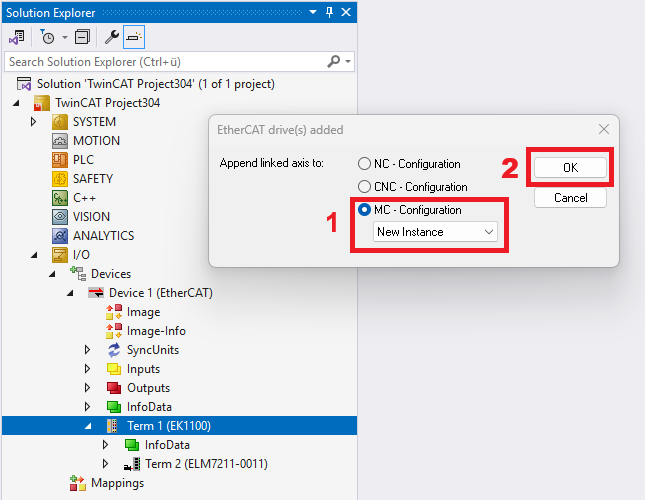
- 2. Wählen Sie im sich öffnenden Dialog „EtherCAT drive(s) added“ die Option MC – Configuration (1) aus. Wenn im TwinCAT Projekt bereits eine Motion-Konfiguration angelegt ist, können Sie die gewünschte Instanz im Auswahlmenü anwählen. Die Auswahl New Instance bewirkt einen neuen Motion-Konfigurationsknoten. Bestätigen Sie den Dialog mit OK (2).
- Im TwinCAT Project im Solution Explorer wird eine neue Motion-Konfiguration sowie eine Achse angelegt. Diese wird automatisch mit der Hardware verknüpft.
Link To I/O – Eine Achse manuell verknüpfen
Vorgehen – Beispiel für EL72xx/ELM72xx, AX5000, AX8000
- Hardwarekonfiguration wurde angelegt.
- Motion-Konfiguration mit einer MC3-Achse wurde angelegt.
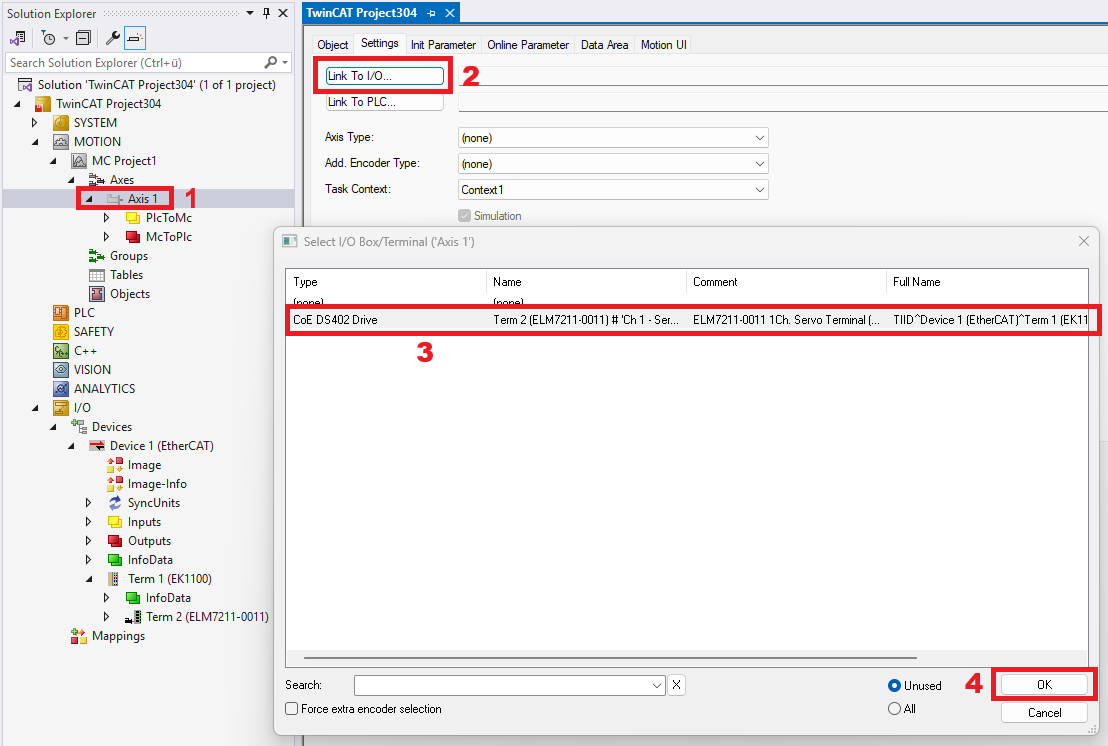
- 3. Wählen Sie die zu verknüpfende Achse (1) > Registerkarte Settings
- 4. Klicken Sie auf Link To I/O…(2).
- 5. Selektieren Sie die zu verknüpfende Antriebshardware (3).
- 6. Bestätigen Sie die Auswahl mit OK (4).
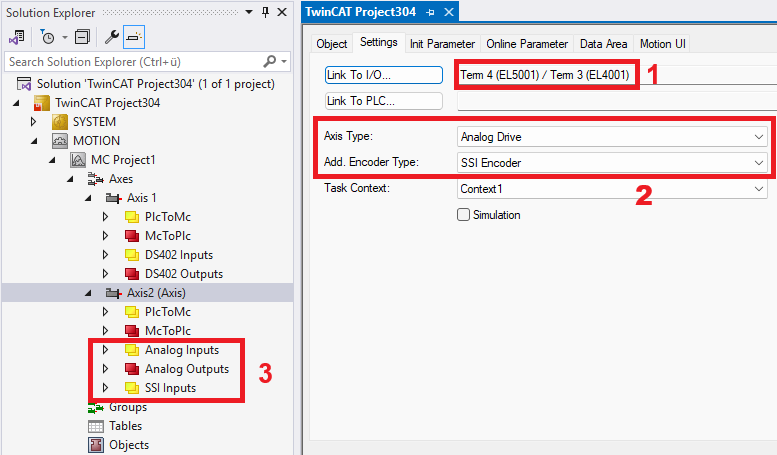
Vorgehen – Beispiel Analog Drive mit zusätzlichem Encoder
- In diesem Fall gelten zunächst die gleichen Schritte wie im vorherigen Abschnitt. Beachten Sie im Dialog „Select I/O Box/Terminal“ folgende Auswahl:
- 7. Wählen Sie die Option Force extra encoder selection, bevor Sie den Dialog durch OK quittieren.
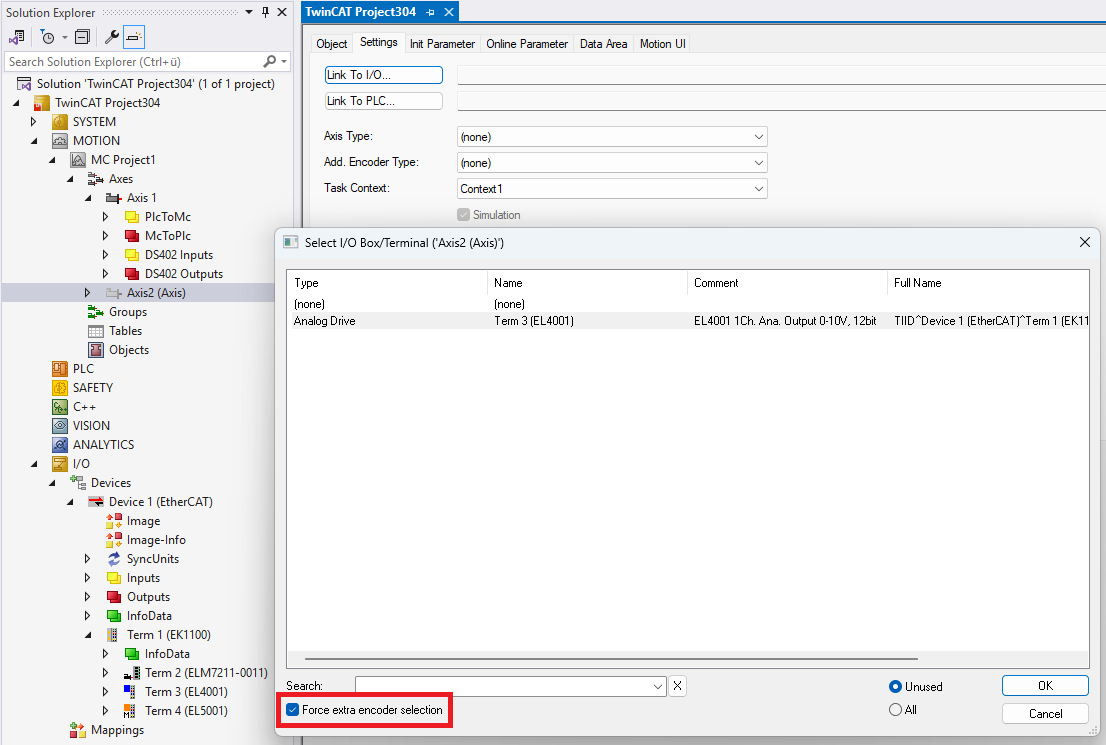
- Es öffnet sich ein weiterer Dialog.
- Wählen Sie einen Encoder aus und bestätigen Sie die Auswahl mit dem Button OK.
- Im Textfeld neben der Schaltfläche Link To I/O… werden die verknüpften Hardwaregeräte angezeigt (1).
- Der Typ der Achse und des zusätzlichen Encoders werden angezeigt (2).
- Die zyklischen Schnittstellen zwischen der MC3-Achse und den I/O-Geräten sind sichtbar (3).