Konfiguration
- Um einen Planar-Track anzulegen, muss zunächst eine MC Configuration angelegt werden.
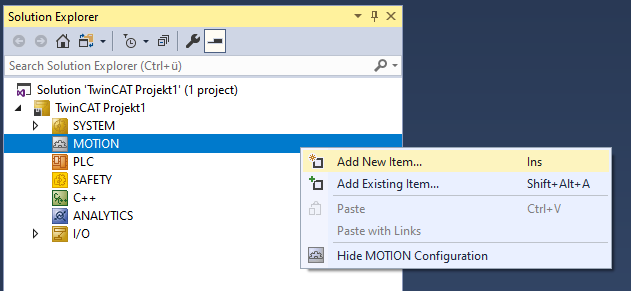
- 1. Wählen Sie MOTION > Add New Item… aus.
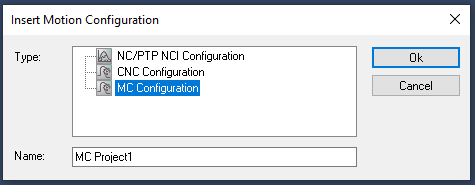
- 2. Wählen Sie im folgenden Dialogfenster MC Configuration aus und bestätigen Sie mit OK.
- Sie haben ein MC Project angelegt.
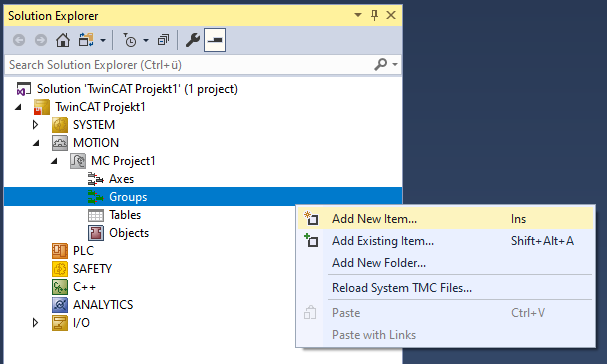
- 3. Wählen Sie im erzeugten MC Project > Groups > Add New Item… aus.
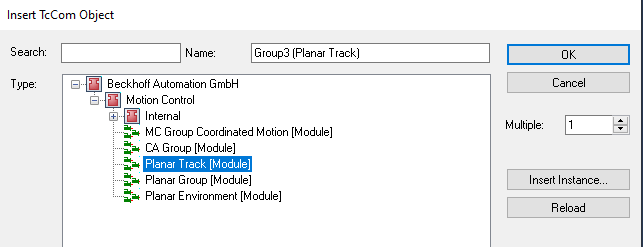
- 4. Legen Sie im folgenden Dialogfenster einen (oder mehrere) Planar-Tracks an und bestätigen Sie mit OK.
- Der Planar-Track ist nun angelegt und kann parametriert werden.
Detailbeschreibung öffnen
- Planar-Track im Baum auswählen und doppelklicken.
Bedeutung der einzelnen Reiter
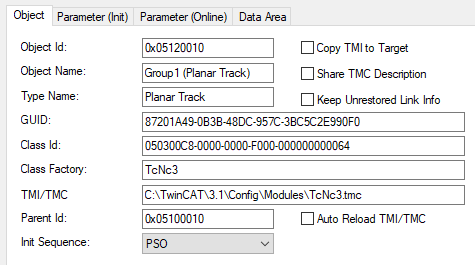
Object: Hier werden allgemeine Informationen (Name, Typ, Id, usw.) dargestellt.
Parameter (Init): Gibt Initialparameter an, die der Anwender verändern kann, um das Verhalten des Tracks zu beeinflussen.
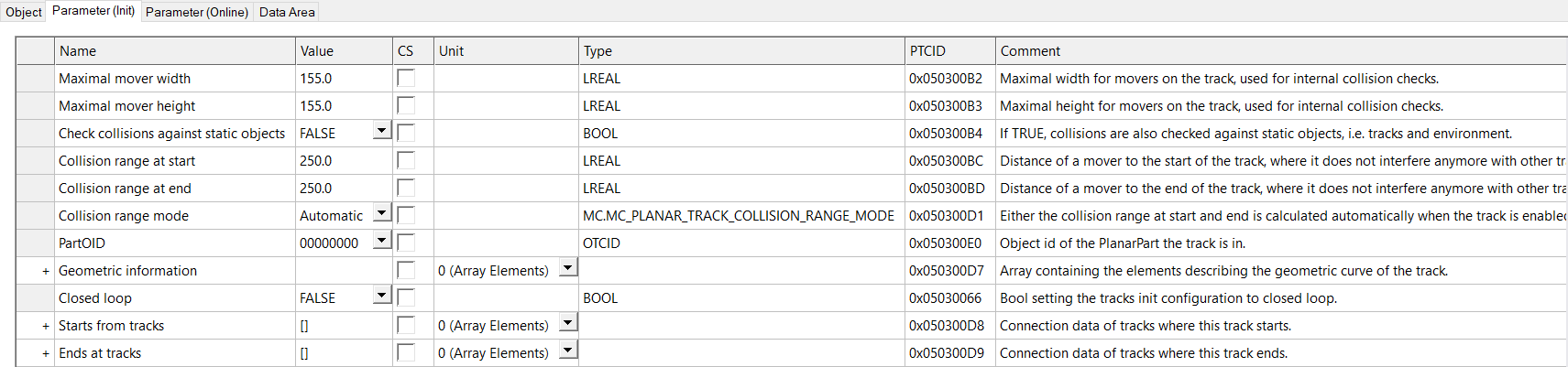
Die Initialparameter sind zunächst so eingestellt, dass der Planar-Track (fertig verknüpft) mit Hardware verfahren werden kann. Wenn die Mover auf dem Track größer oder kleiner sind, sollten die beiden Parameter „Maximal mover width/height“ angepasst werden. Der Parameter „Check collision against static objects“ bestimmt, ob für einen Track in einer Planar-Group Kollisionen mit anderen statischen Objekten (Tracks/Rand der Statorfläche) geprüft werden. Der Parameter „Collision range mode“ bestimmt, ob die „Collision range at start/end“ vom Anwender über die entsprechenden Parameter angegeben wird oder vom Track intern automatisch berechnet wird. Die „Collision range“ ist die Entfernung vom Start/Ende des Tracks, ab der ein Planar-Mover für Planar-Mover auf anderen Tracks für die Kollisionsvermeidung berücksichtigt wird.
Der versteckte Initialparameter „TraceLevel“ beeinflusst, wie viele Informationen protokolliert werden (siehe Protokollierung („Logging/Tracing“)).
Die Parameter „Geometric information“, „Closed loop“, „Starts from tracks“ und „Ends at tracks” können genutzt werden, um die Geometrie des Tracks und seine Verbindung mit anderen Tracks zu definieren. Dabei wirken die Parameter exakt wie die entsprechenden PLC-Befehle.
Der Parameter „PartOID“ gibt an, welchem Part dieser Track fest zugeordnet ist. Wenn es einen eindeutigen Part gibt oder das Part-Feature nicht genutzt wird (kein Auslesen der Processing Unit durch die Environment), muss der Parameter nicht gesetzt werden. Andernfalls muss der Parameter gesetzt werden, damit der Track aufstartet. Alle Positionen in den Init- und Online-Parametern (Geometric [online] information) werden in diesem Part-System angegeben. Die Parameter „Starts from tracks“ und „Ends at tracks” sind erweitert worden, um die zusätzliche Funktionalität der entsprechenden PLC-Befehle für das Part-Feature abzubilden.
Parameter (Online): Zeigt den Zustand des Tracks zur Laufzeit, z. B. die Anzahl der Planar-Mover oder die -Länge.
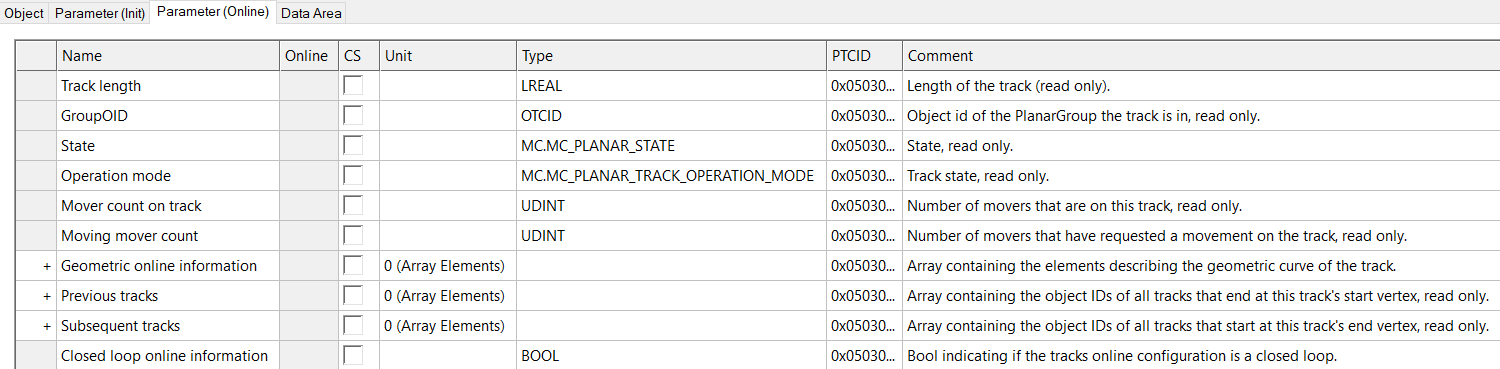
Die Parameter „Previous Tracks“ und „Subsequent Tracks” sind Arrays, die die OIDs aller direkt vor bzw. direkt hinter diesem Track liegenden Tracks enthalten.
Der Parameter „Geometric online information“ zeigt die zur Laufzeit vorhandene Geometrie des Tracks an. Diese resultiert aus dem entsprechenden Initialparameter und/oder den genutzten PLC-Befehlen.
Der Parameter „Closed loop online information“ gibt an, ob der Track eine geschlossene Schleife bildet (einen Kreis).
Data Area: Zeigt den Speicherbereich, über den der Track mit dem PLC-Track kommuniziert.
