Tracknetzwerke und Kollisionsvermeidung
Tracks und Tracknetzwerke
Tracks sind vom Nutzer vorgegebene statische Pfade auf der Statorfläche. Mehrere Tracks können stetig (inklusive Richtung und Krümmung) in einem Punkt verbunden werden, damit Mover von einem Track auf einen anderen wechseln können. Wenn mehr als zwei Tracks an einem Punkt derart verbunden sind, so entsteht dort eine Weiche. Dadurch kann ein Netzwerk von zusammenhängenden Tracks erstellt werden.
Auf einem einzelnen Track kann ein Mover sowohl vorwärts als auch rückwärts fahren. Ein Übergang zu einem anderen Track kann nur von einem Trackende zu einem Trackanfang vollzogen werden, nicht andersherum.
Kollisionsvermeidung in einem Tracknetzwerk
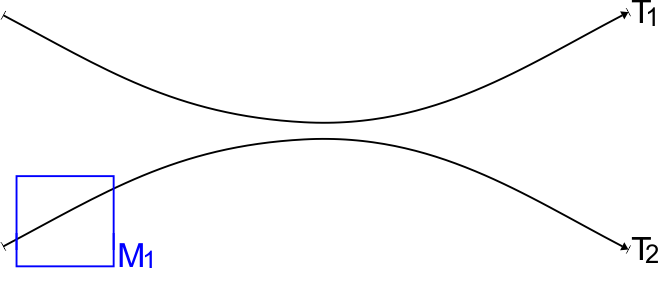
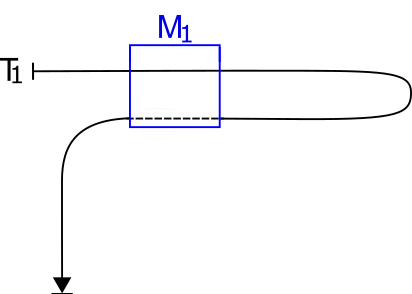
Mover, die sich in einem Tracknetzwerk bewegen, vermeiden Kollisionen mit anderen Movern im selben Tracknetzwerk. Ausgenommen hiervon sind Stellen, an denen sich Tracks ohne eine Weiche kreuzen oder zu nahe aneinander oder an sich selbst vorbeiführen (siehe Abbildungen). Derartige Konfigurationen sollten vermieden werden.
Negativbeispiele:

Jeder Mover hat einen Mindestabstand („Gap“) eingestellt, den er auf seinem Pfad zum Mover vor und hinter sich einhalten muss. Diese Gap wird gemessen zwischen den Positionen der Mover auf dem Track und kann mit jedem Verfahrbefehl neu gesetzt werden.
In der Nähe einer Weiche muss ein Mover gegebenfalls zusätzlich auf potentielle Kollisionen mit Movern achten, die sich auf anderen mit der Weiche verbundenen Tracks befinden, selbst wenn diese Tracks nicht Teil des geplanten Pfades des Movers sind. Ob diese zusätzliche Kollisionsvermeidung für einen Mover zu einem Zeitpunkt aktiv ist, hängt von vier Faktoren ab:
- der aktuellen Position des Movers,
- der frühest möglichen Ruheposition des Movers (ergibt sich aus der aktuellen Dynamik und den Dynamiklimits),
- der eingestellten Gap des Movers,
- dem entsprechenden Collision Range Parameter des aktuellen Tracks.
Wenn die Strecke zwischen aktueller Position und frühestmöglicher Ruheposition des Movers dabei an irgendeinem Punkt weniger als Gap oder Collision Range von der Weiche entfernt ist, ist die zusätzliche Kollisionsvermeidung für diesen Mover aktiv. Wenn dies der Fall ist, werden alle anderen Mover, für die diese Bedingung auch erfüllt ist, in der Dynamikplanung berücksichtigt.
Definition der Collision Ranges
Die Bedeutung der Collision Range Parameter für die Kollisionsvermeidung wurde im vorigen Abschnitt beschrieben. Dabei bezieht sich „Collision Range at start“ auf den Abstand zur Weiche am Startpunkt des Tracks und „Collision Range at end“ auf den Abstand zur Weiche am Endpunkt des Tracks.
Ein intuitiveres Verständnis für die Collision Range Parameter ergibt sich aus folgender Empfehlung: Die Collision Range sollte so eingestellt sein, dass ein Mover, der sich in diesem Abstand zur zugehörigen Weiche (am Start oder Ende des Tracks) befindet, nicht mit Movern auf anderen Tracks, die an die Weiche anschließen, kollidieren kann.
Um die Konfiguration zu vereinfachen, werden die entsprechenden Werte für die Collision Ranges automatisch berechnet und übernommen, wenn der Parameter „Collision range mode“ auf „Automatic“ eingestellt ist. Wird statt „Automatic“ „Manual“ gewählt, werden stattdessen die vom Nutzer eingetragenen Werte verwendet. Sollten diese zu kleine gewählt sein, kann dies unter Umständen Kollisionen zur Folge haben. Sind sie hingegen deutlich zu groß gewählt, blockieren sich möglicherweise Mover auf verschiedenen Tracks, die tatsächlich weit voneinander entfernt sind und gar nicht kollidieren können.
Wenn ein Track am Startpunkt (Endpunkt) entweder keine Weiche hat, oder an der Weiche keine anderen Tracks starten (enden), kann die entsprechende Collision Range auf 0 gesetzt werden.
Beispiele und Bilder:
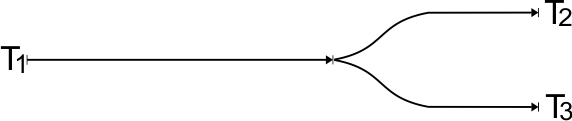
In diesem Beispiel kann die „Collision range at end“ für Track 1 auf Null gesetzt werden, da an der Weiche zwar zwei andere Tracks starten, jedoch keine anderen Tracks enden. Der Parameter „Collision range at start“ für die Tracks 2 und 3 sollte so gewählt sein, dass ein Mover mit diesem Abstand zur Weiche nicht mit Movern auf dem jeweils anderen Track kollidieren kann.

Beispiel für die Ermittlung sinnvoller Collision Range Parameter (T1, T2 und T3 enden am Start von T4): Wenn R der maximale Moverradius von Movern auf dem Track ist, kann ein „Schlauch“ mit Radius 2*R um einen Track gelegt werden (hier um Track 2), um ein Minimum für die Collision Ranges auf den anderen Tracks zu bestimmen. In diesem Beispiel hat Track 1 eine kleinere „Collision range at end“, da er sich schnell von den anderen Tracks entfernt und Track 3 und Track 2 haben eine größere „Collision range at end“, da sie länger eng zusammen verlaufen.

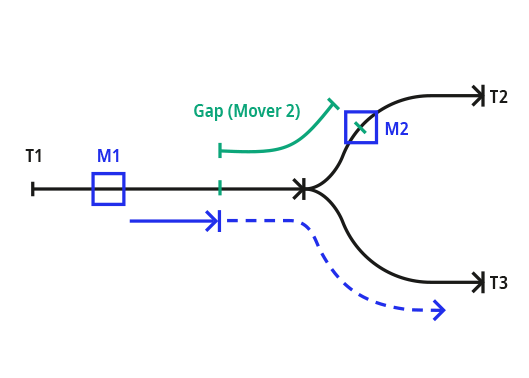
In diesem Beispiel ist für Mover 1 die zusätzliche Kollisionsvermeidung an der Weiche aktiv, da schon allein sein Abstand zur Weiche geringer ist als die eingestellte Collision range.
Mover 2 steht in diesem Beispiel still und ist weiter von der Weiche entfernt als Gap oder Collision Range. Die zusätzliche Kollisionsvermeidung ist daher nicht aktiv und die beiden Mover müssen zu diesem Zeitpunkt keine Rücksicht aufeinander nehmen.

In diesem Beispiel steht Mover 1 auf Track 1 innerhalb der Collision Range, daher blockiert Mover 1 die Bewegung von Mover 2 nach Track 3. Mover 2 stoppt genau am Anfang der Collision Range von Track 2, da dies der letzte sichere Haltepunk ist. Würde die Gap von Mover 1 und Mover 2 es erlauben, würde Mover 2 einen entsprechend späteren Halt anfahren.

In diesem Beispiel steht Mover 1 auf Track 1 innerhalb der Collision Range, daher blockiert Mover 1 die Bewegung von Mover 2 nach Track 3. Mover 2 stoppt genau mit Abstand seiner Gap zum Ende von Track 2. Würde die Gap von Mover 1 und Mover 2 es erlauben, würde Mover 2 einen entsprechend späteren Halt anfahren.
In den letzten beiden Beispielen fährt Mover 2 jeweils weiter, wenn Mover 1 sich so weit nach vorne bewegt hat, dass beide Mover einen Mindestabstand haben, der größer als die Gap beider Mover ist.

In diesem Beispiel ist Mover 2 weiter als Gap oder Collision Range von der Weiche entfernt, daher kann Mover 1 ungehindert auf Track 3 fahren. Sollte sich Mover 2 zurückbewegen, ergibt sich eventuell eine Blockierung, wenn der Abstand zur Weiche kleiner als Gap oder Collision Range ist.
In diesem Beispiel ist Mover 2 näher als Gap an der Weiche, daher kann Mover 1 nicht auf Track 3 fahren. Mover 1 wird damit auf seinem Weg nach Track 3 auf Track 1 blockiert und hält an, solange Mover 2 nicht weiter von der Weiche wegbewegt wird. Sollte Mover 2 fortbewegt werden, dass seine Gap nicht mehr den Knoten einschließt, dann kann Mover 1 sein Ziel auf Track 3 erreichen. Wird die Gap von Mover 2 verringert, dann kann Mover 1 weiterfahren (evtl. sogar bis zu seinem Ziel auf Track 3).
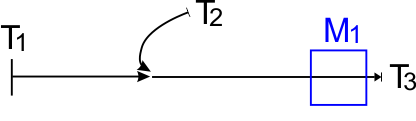
Dies ist ein Beispiel für eine zu vermeidende Konstruktion, bei der das Ende eines Tracks (hier T2) die Collision Range at start eines anderen Tracks (T3) beeinflusst (und umgekehrt). Eine solche Situation wird im Falle vom Automatic Collision Range Mode nicht erkannt. Ist sie dennoch gewünscht, ist hier eine manuelle Einstellung der Collision Ranges nötig. Von Tracks mit derart engen Kurven, wie die des T2 in diesem Beispiel, ist jedoch auch aufgrund der starken Limitierung der Dynamik (enge Kurven erzeugen auch beim Durchfahren mit niedrigen Geschwindigkeiten große Fliehkräfte) dringend abzuraten.