Parts und Koordinatensysteme
Die Fläche, auf der sich XPlanar-Mover bewegen, ist aus Statoren aufgebaut. Diese sind z. B. Quadrate mit einer Seitenlänge von 240 mm oder Rechtecke/Quadrate mit einer Seitenlänge von 160 bzw. 320 mm. Die gesamte Grundfläche unterteilt sich in ein oder mehrere Parts, die aus einer oder mehreren Statoren bestehen. Dabei kann ein Stator nur zu genau einem Part gehören, d. h., die Parts überlappen sich nicht. Die Menge aller Statoren eines Parts muss dabei eine zusammenhängende Fläche ergeben.
Diese geometrische Konfiguration des XPlanar-Systems ist meist statisch, sie ändert sich nicht zur Laufzeit des Systems. Um eine dynamische Konfiguration zu erzeugen, muss der Nutzer einzelne Parts bewegen bzw. versetzen, indem er ihnen mehr als eine Position zuweist und zur Laufzeit aktiviert.
Insgesamt ergibt sich die Schwierigkeit, dass Positionen nicht mehr eindeutig sind, bzw. es kein absolutes Koordinatensystem gibt. Der Nutzer kann mehrere (2D-) Koordinatensysteme definieren und seine Parts in diesen platzieren.
 | Eine 2D-Position (z. B. eines Movers oder Tracks) ist nun unvollständig, ohne die Angabe, in welchem Koordinatensystem sie sich befindet. |
Beispiel
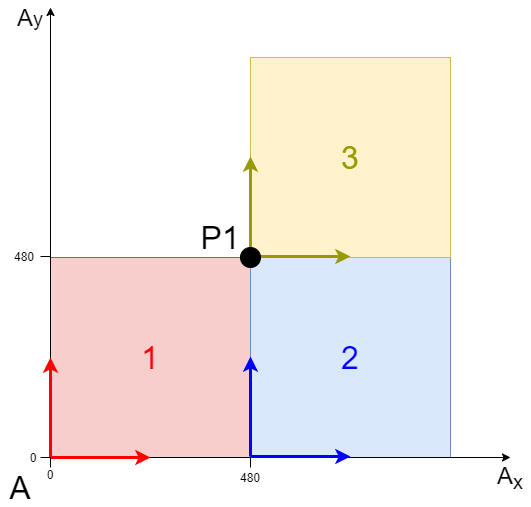
Es gibt vier Parts 1-4 und zwei Koordinatensystem A und B. Part 3 ist entweder in Koordinatensystem A oder B. Die anderen Parts sind fest einem Koordinatensystem zugeordnet. Die Position P1 liegt im Koordinatensystem A an der Position mit X=480 und y=480 (kurz P1=(480,480,A)).
Die Position P2 liegt im Koordinatensystem B an der Position mit X=480 und y=480 (kurz P2=(480,480,B)).
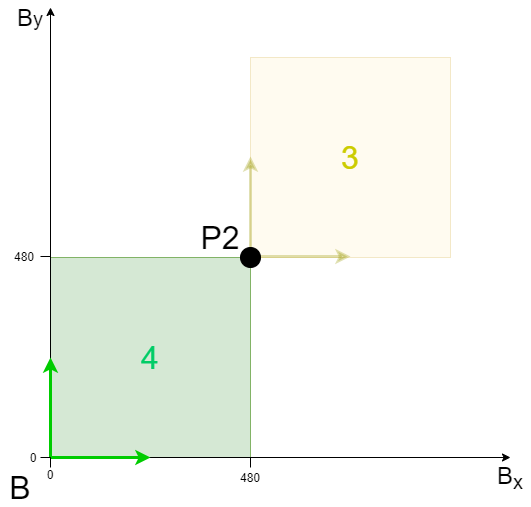
Ohne die Angabe des Koordinatensystems A wäre die Position P1 nicht von der Position P2 in Koordinatensystem B zu unterscheiden (480,480,B). Beide Positionen sind jedoch verschieden und liegen nicht einmal im selben Koordinatensystem, d. h., es existiert keine geometrische Verbindung zwischen ihnen (z. B. kann ein Mover nicht von P1 nach P2 fahren).
Zusätzlich zu den Koordinatensystemen A und B existieren noch lokale Part-Koordinatensysteme für jeden der Parts 1-4. Diese Koordinatensysteme haben ihren Ursprung jeweils in der unteren linken Ecke ihres Parts. Damit ist P1 = (0,0,3) = (0,480,2) = (480,480,1) in den Part-Koordinatensystemen der Parts 1-3.
Dies stimmt für Part 3 nur so lange, wie dieser in Koordinatensystem A liegt. Die transparente Darstellung von Part 3 in Koordinatensystem B zeigt, dass Part 3 seine Position aus Koordinatensystem A zu Koordinatensystem B wechseln kann. Die Position eines Parts ist identisch mit dem Ursprung seines Koordinatensystems. Part 3 würde also von Position P1 (in Koordinatensystem A) zu Position P2 bewegt, nun kann P1 nicht mehr im Koordinatensystem von Part 3 angegeben werden.
Stattdessen kann die Position P2 = (0,0,3) = (480,480,4) im Koordinatensystem von Part 3 (und 4) angegeben werden. Insgesamt wird ersichtlich, dass Positionen in Part-Koordinatensystemen nicht statisch sind, wenn der Part mit seinem Koordinatensystem bewegt wird.