MC_BUFFER_MODE
TF5410 | TF5420 | |
|---|---|---|
MC Group with Pick-and-Place | MC Group Coordinated Motion | |
|
|
|

Der Datentyp MC_BUFFER_MODE wird verwendet, um festzulegen, wie aufeinanderfolgende Fahrkommandos abgearbeitet werden sollen. Damit der Puffermodus eine Wirkung hat, sind mindestens zwei Funktionsbausteine erforderlich.
TYPE MC_BUFFER_MODE :
(
mcAborting := 16#0,
mcBuffered := 16#1,
mcBlendingLow := 16#12,
mcBlendingPrevious := 16#13,
mcBlendingNext := 16#14,
mcBlendingHigh := 16#15
) UINT;
END_TYPEBeispiel:
Im folgenden Beispiel wird ein Move-Kommando verwendet, um eine Gruppe von Position P0 zu P1 und dann zu P2 zu bewegen. Der Referenzpunkt für die verschiedenen Geschwindigkeitsprofile ist immer P1. Der Modus legt die Geschwindigkeit v1 oder v2 an diesem Punkt fest.
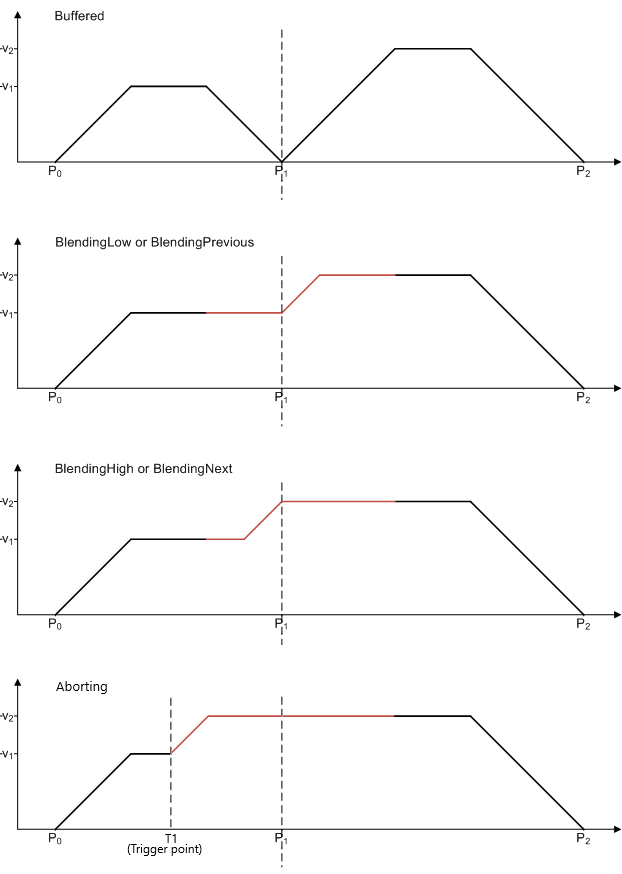
Da die Geschwindigkeit des ersten Kommandos niedriger ist als die des zweiten, führen die Modi BlendingLow/BlendingPrevious und BlendingHigh/BlendingNext jeweils zum selben Ergebnis.
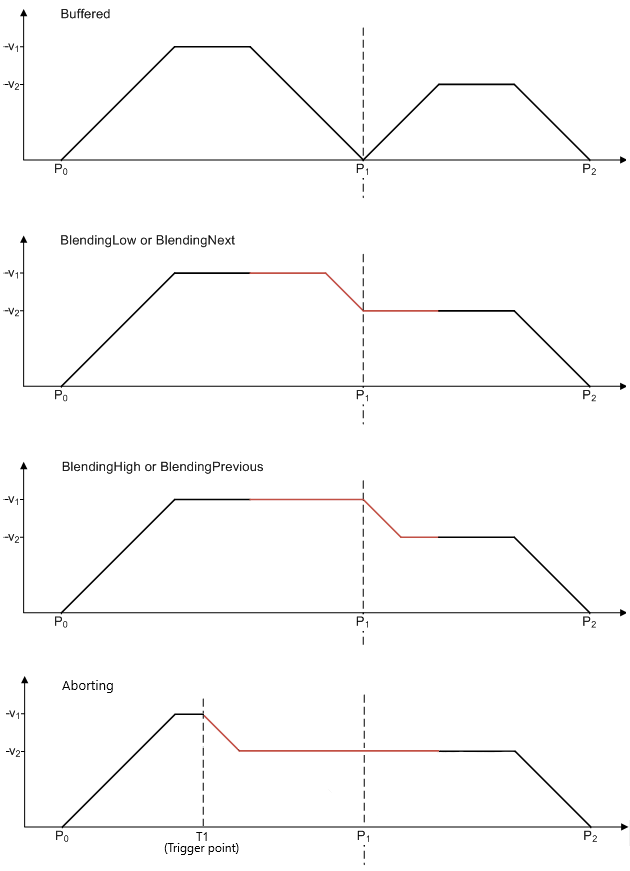
Wenn die Geschwindigkeit des zweiten Kommandos niedriger ist als die des ersten, sind die Modi BlendingLow/BlendingPrevious und BlendingHigh/BlendingNext jeweils gleichwertig.
Kombinationen von Puffermodus und Transitionsmodus
Die folgende Tabelle zeigt die möglichen Kombinationen von Transitionsmodus und Puffermodus und ihre Wirkung.
TM/PM | mcAborting | mcBuffered | mcBlendingPrevious | Sonstige |
|---|---|---|---|---|
mcTransModeNone | Das vorherige Kommando wird sofort abgebrochen. Eine neue Bewegung wird gestartet. Die Geschwindigkeit im Übergang ist 0. Diese Kombination ist nur für das 1. Segment einer Bahn zulässig. | Stopp am Ende des vorherigen Kommandos. Anschließend wird das nächste Kommando ausgeführt. | Nicht zulässig | Nicht zulässig |
mcTransModeCornerDistance Neu ab V3.1.10.1, nur mit MC Group Coordinated Motion kompatibel | Blending vom aktiven Segment zum ersten Segment des neuen Kommandos. Der Schnittpunkt der Segmente wird durch die Strecke definiert, die für den Stopp auf dem aktiven Segment benötigt wird. Diese Kombination ist nur für das 1. Segment einer Bahn zulässig. | Nicht zulässig | Blending vom letzten programmierten Kommando zum neuen Kommando | Nicht zulässig |
mcTransModeCornerDistanceAdvanced | Blending vom aktiven Segment zum ersten Segment des neuen Kommandos. Der Schnittpunkt der Segmente wird durch die Strecke definiert, die für den Stopp auf dem aktiven Segment benötigt wird. Diese Kombination ist nur für das 1. Segment einer Bahn zulässig. | Nicht zulässig | Blending vom letzten programmierten Kommando zum neuen Kommando | Nicht zulässig |
Sonstige | Nicht zulässig | Nicht zulässig | Nicht zulässig | Nicht zulässig |
Voraussetzungen
Entwicklungsumgebung | Zielplattform | Einzubindende |
|---|---|---|
TwinCAT V3.1.4018.26 TF5400 Advanced Motion Pack V3.1.1.17 | PC oder CX (x64) | Tc3_McCoordinatedMotion, Tc2_MC2 |