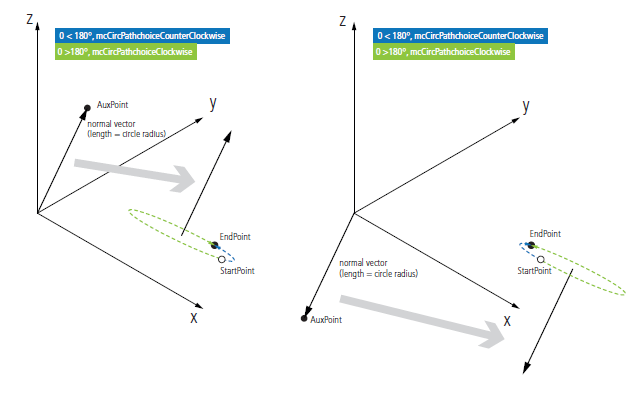
Bilder | - Vier verschiedene Bögen werden durch die Orientierung des Normalenvektors und dem Parameter "PathChoice" unterschieden.
|
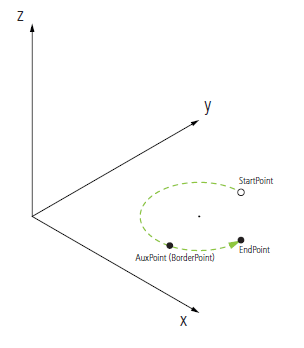
StartPoint | - Die Bewegung beginnt am Anfangspunkt "StartPoint".
|
| - Dieser Punkt ist der Endpunkt des vorhergehenden Move-Kommandos.
|
| - Der zu konstruierende Kreis und seine Ebene enthalten den Anfangspunkt.
|
| |
AuxPoint Normalvektor | - Der Benutzer konfiguriert den Parameter "AuxPoint", der in diesem Modus als Normalenvektor der Kreisebene fungiert. Seine Länge gibt den Radius des Kreises an.
|
EndPoint | - Der Benutzer konfiguriert den Endpunkt "EndPoint".
|
| - Die Bewegung wird an diesem Punkt enden.
|
| - MC-Gruppe nur mit Pick-And-Place: Wenn dieser Punkt außerhalb der durch "StartPoint" und den Normalenvektor definierten Ebene liegt, folgt die Bewegung einer Helix anstelle eines Kreises.
|
| |
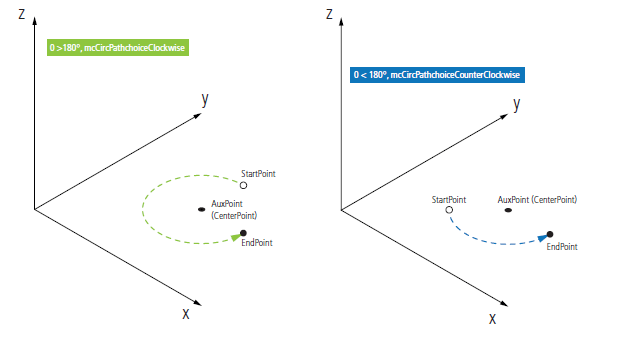
PathChoice und resultierender Bogen | - Die Rechte-Hand-Regel wird für alle "PathChoice"-Werte angewendet, mit Ausnahme von mcCircPathchoiceClockwise, das der Linken-Hand-Regel folgt.
|
| - mcCircPathchoiceCounterClockwise und mcCircPathchoiceShortSegment beschreiben einen Bogen, der einen Winkel <= 180° abdeckt, mcCircPathchoiceClockwise und mcCircPathchoiceLongSegment beschreiben einen Bogen, der einen Winkel >= 180° abdeckt.
|
| - Welcher der 4 möglichen Bögen mit einem gegebenen Radius gewählt wird, hängt vom "PathChoice"-Argument und von der Orientierung des Normalenvektors ab. Siehe obige Tabelle für weitere Informationen.
|
| |
Anwendbarkeit | - Der Modus mcCircModeRadius kann nur zur Beschreibung von Bögen verwendet werden, die einen Winkel < 360° abdecken.
- Die Länge des Normalenvektors (d.h. der Radius des Kreises) muss mindestens die Hälfte der Entfernung zwischen Start- und Endpunkt betragen.
|

 bis v3.2 einschließlich)
bis v3.2 einschließlich)