Hintergrundinformationen
Koordinatensysteme – Beziehungen
- WCS
Weltkoordinatensystem. - MCS
Maschinenkoordinatensystem. - UCS
Benutzerkoordinatensystem. - PCS
Programmiertes Koordinatensystem. Werkstück.
Pick-and-Place: Vom Lager zum Träger
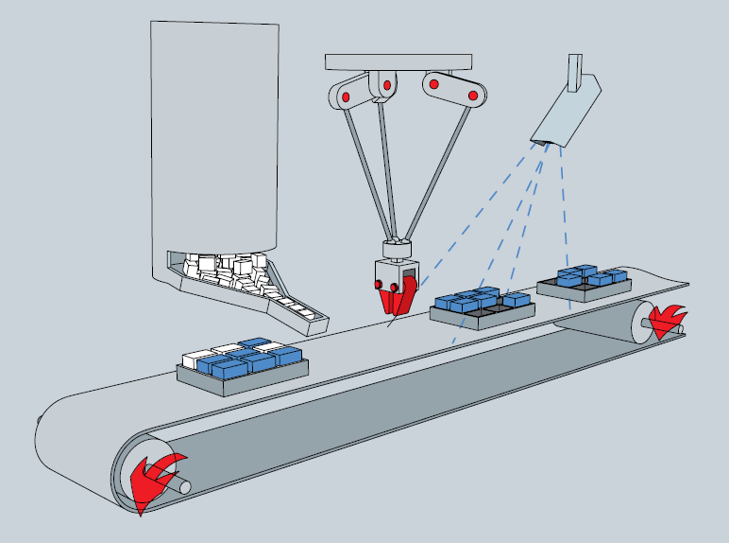
Die Werkstücke müssen vom Lager in die auf dem Förderband laufenden freien Trägerplätze gelegt werden.
Dabei
- wird der Lagerplatz im
WCSdefiniert, - befindet sich der Roboter irgendwo im
WCS, - kann der Roboter in seinem
MCSgesteuert werden, - befindet sich das Förderband irgendwo im
WCS, - kann sich ein Träger auf dem Förderband im
UCSbefinden, - kann sich ein Werkstück in seinem Träger im
PCSbefinden.
Pick-and-Place: Von Förderband zu Förderband
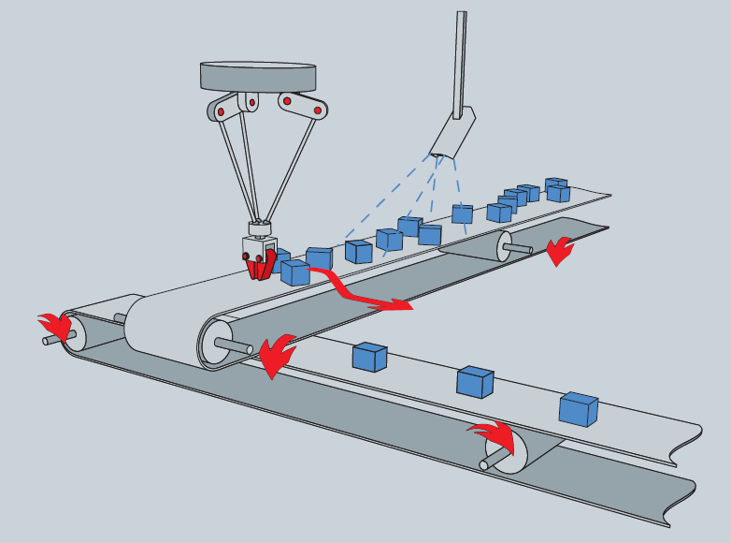
Die Werkstücke müssen vom oberen Förderband abgenommen und auf das untere Förderband gelegt werden.
Dabei
- befindet sich der Roboter irgendwo im
WCS, - kann der Roboter in seinem
MCSgesteuert werden, - befindet sich jedes Förderband irgendwo im
WCS, - können sich Werkstücke auf dem Förderband in einem
UCSbefinden.