MC_SYNC_STRATEGY
TF5410 | TF5420 | |
|---|---|---|
MC Group with Pick-and-Place | MC Group Coordinated Motion | |
|
|
|


Der Datentyp MC_SYNC_STRATEGY definiert das Synchronisationsprofil des Slaves, z. B. für ein MC_GearInPosCA-Kommando.
TYPE MC_SYNC_STRATEGY :
(
mcSyncStrategyLate := 16#1,
mcSyncStrategySlow := 16#2,
mcSyncStrategyEarly := 16#3
)
END_TYPEBeispiele:
Die Rahmenbedingungen in den folgenden Beispielen sind gleich:
- Die Master-Bewegung ist gleich.
- Die MasterStartDistance ist gleich.
- Die Strecken (MasterSyncPosition – aktuelle Master-Position) und (SlaveSyncPosition – aktuelle Slave-Position) sind in allen drei Beispielen gleich.
- Die Slave-Dynamik ist gleich.
- Konfiguration mit einer Achse in der CA-Gruppe, eine PTP-Achse als Master.
- Ein Bewegungskommando wird an den Master ausgegeben.
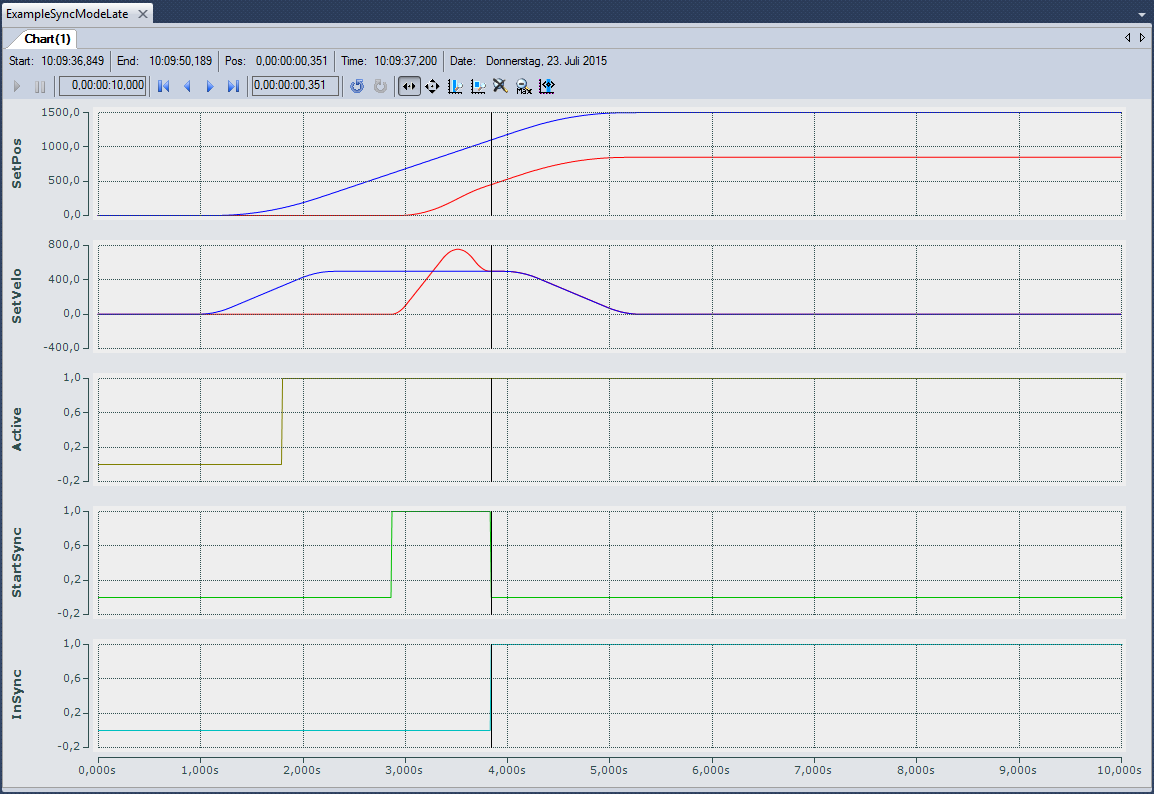
Beispiel 1: mcSyncStrategyLate
Der Slave beginnt mit der Synchronisation so spät wie möglich und mit voller Dynamik (gemäß den Eingangswerten Geschwindigkeit, Beschleunigung, Verzögerung, Ruck). Er erreicht die SlaveSyncPosition gerade rechtzeitig mit dem richtigen Getriebefaktor. Der Benutzer muss darauf achten, dass der Master nicht beschleunigt, sobald der Slave StartSync signalisiert, da das Synchronisationsprofil bereits mit der maximalen Slave-Dynamik geplant ist. Der Slave kann nicht gegen seine dynamischen Beschränkungen verstoßen und daher eine Beschleunigung des Masters nicht ausgleichen. Diese Situation führt zu einem Fehler am Funktionsbaustein.
- 1. Geben Sie das Kommando MC_GearInPosCA an die Achse aus. Das Kommando wird aktiv, während der Master noch beschleunigt.
- Der Slave beginnt mit der Synchronisation so spät wie möglich und mit voller Dynamik und hat die SlaveSyncPosition erreicht, wenn der Master die MasterSyncPosition erreicht hat (schwarzer x-Cursor).
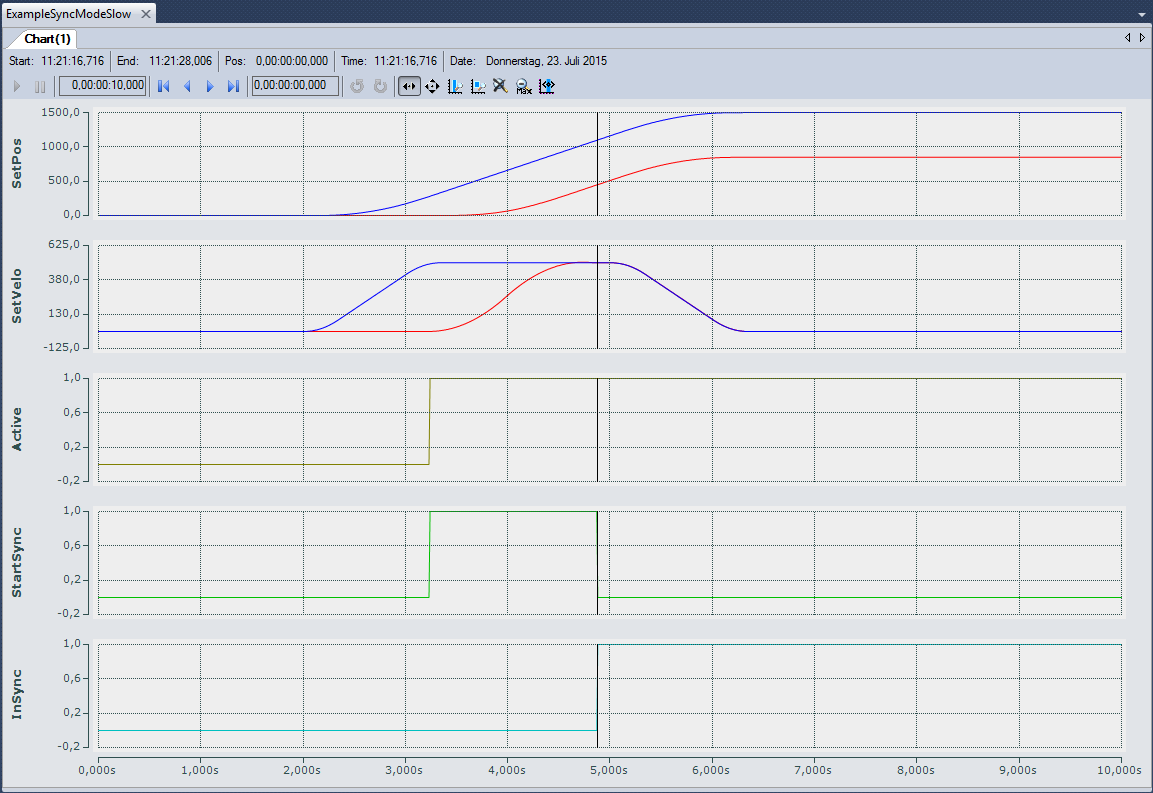
Beispiel 2: mcSyncStrateySlow
Der Slave beginnt seine Synchronisation in Bewegung, sobald der Master (MasterSyncPosition – MasterStartDistance) in der richtigen Richtung passiert, wenn eine MasterStartDist gesetzt wurde, anderenfalls sobald der Funktionsbaustein Active ist. Die Dynamik des Slaves wird so reduziert, dass der Slave die SlaveSyncPos mit dem richtigen Getriebefaktor gerade rechtzeitig erreicht, wenn der Master die MasterSyncPos erreicht. Der Slave kann eine Beschleunigung des Masters ausgleichen, wenn auch StartSync gesetzt ist, jedoch nur, bis der Slave seine maximale Dynamik erreicht.
- 1. Geben Sie das Kommando MC_GearInPosCA an die Achse aus. Das Kommando wird aktiv, während der Master noch beschleunigt.
- Der Slave beginnt mit der Synchronisation, sobald MC_GearInPosCA Active ist. Die Dynamik wird so reduziert, dass der Slave die SlaveSyncPosition zur gleichen Zeit erreicht, wie der Master die MasterSyncPosition erreicht (schwarzer x-Cursor).
 | Eine Synchronisation auf einen stehenden Master kann bei Verwendung von mcSyncStrategySlow zu einer hohen Last führen. In diesem Fall wird am besten mcSyncStrategyEarly verwendet. |
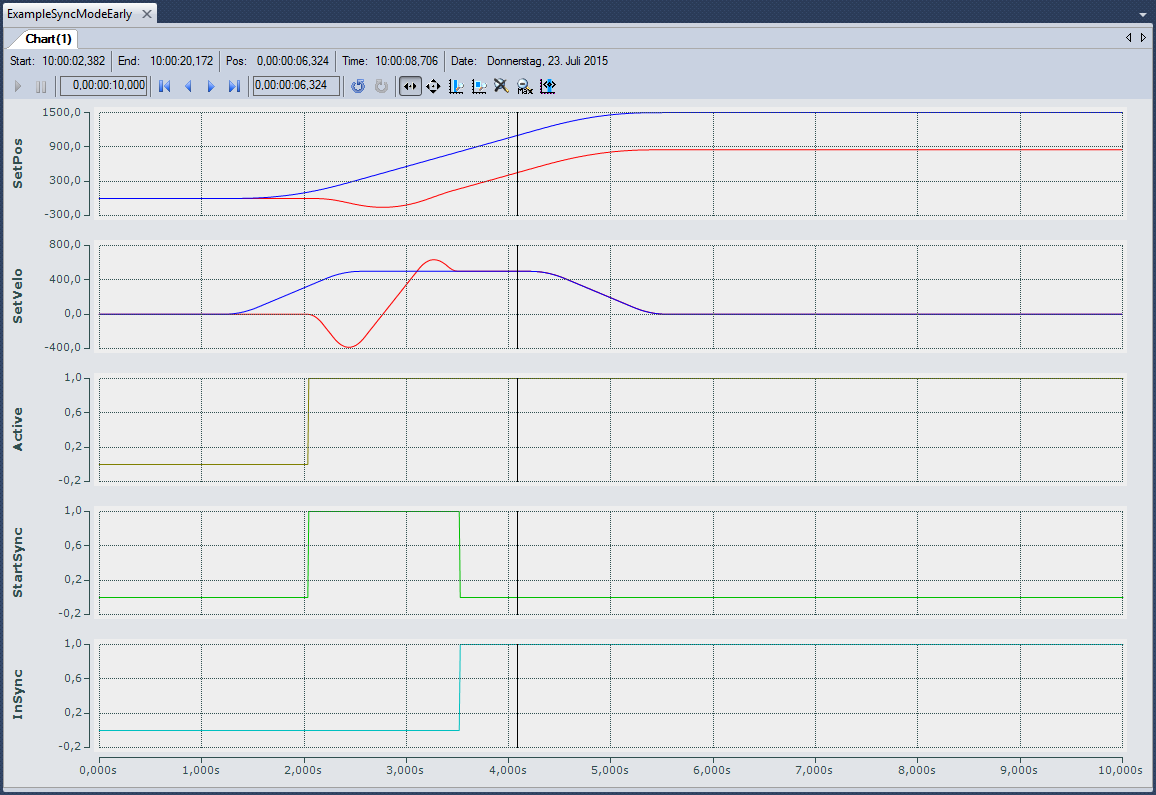
Beispiel 3: mcSyncStrategyEarly
Der Slave beginnt sofort (wenn eine MasterStartDistance gesetzt ist: sofort, nachdem diese zurückgelegt wurde) und mit voller Dynamik mit der Synchronisation. Der Slave signalisiert InSync früher als von der SlaveSyncPosition gefordert, aber es ist dennoch garantiert, dass der geforderte Offset zwischen Master und Slave (MasterSyncPosition – SlaveSyncPosition) mit dem richtigen Getriebefaktor erreicht wird. Diese Strategie kann für die Synchronisation auf einen stehenden Master angewendet werden und ist am besten geeignet, wenn die Geschwindigkeit des Masters nicht konstant ist. Der Slave versucht fortwährend, die Synchronisation durchzuführen. Wenn die Rahmenbedingungen es dem Slave nicht ermöglichen, an der SlaveSyncPosition InSync zu sein, führt dies nicht zu einem Fehler, sondern der Slave versucht kontinuierlich, sich mit dem Master zu synchronisieren.
- 1. Geben Sie das Kommando MC_GearInPosCA an die Achse aus. Das Kommando wird aktiv, während der Master noch beschleunigt.
- Der Slave beginnt mit der Synchronisation, sobald MC_GearInPosCA Active ist, und mit voller Dynamik. Der Slave ist schnellstmöglich InSync, erreicht die SlaveSyncPosition aber zur gleichen Zeit, wie der Master die MasterSyncPosition erreicht (schwarzer x-Cursor).
Voraussetzungen
Entwicklungsumgebung | Zielplattform | Einzubindende |
|---|---|---|
TwinCAT V3.1.4018.26 TF5400 Advanced Motion Pack V3.1.1.17 | PC oder CX (x64) | Tc3_McCoordinatedMotion, Tc2_MC2 |