Konfigurieren der CA-Gruppe für Collision Avoidance
Grundsätzlich gilt die hier beschriebene Konfiguration für alle Motion Objekte im Advanced Motion Pack.
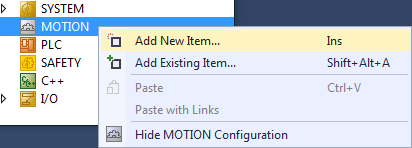
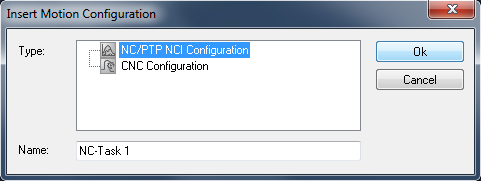
- 1. Fügen Sie im Bereich Motion eine neue NC/PTP NCI Configuration hinzu.
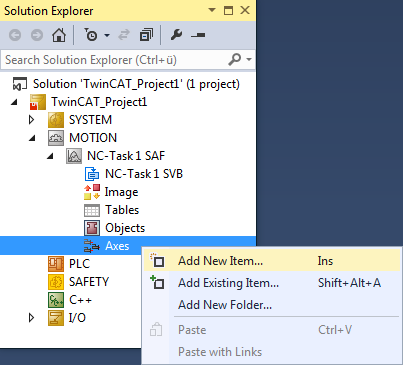
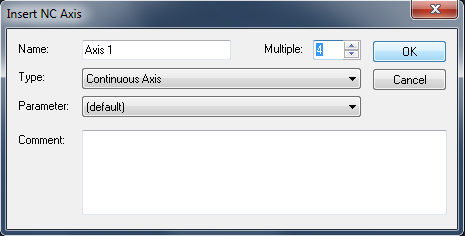
- 2. Fügen Sie der NC-Konfiguration alle Achsen hinzu.
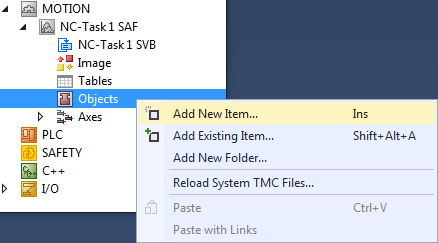
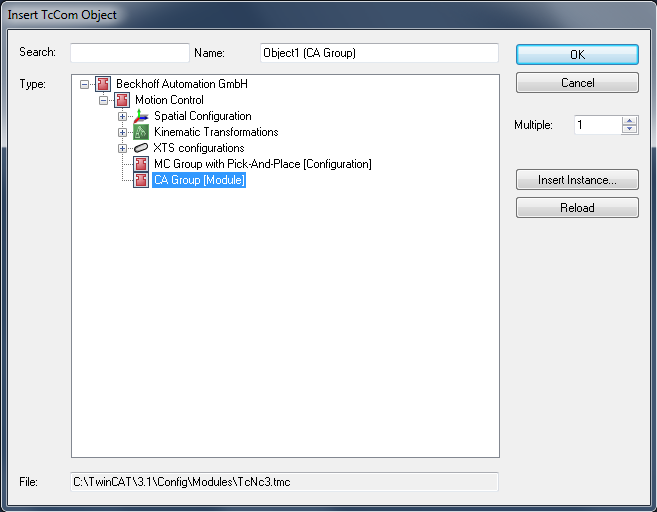
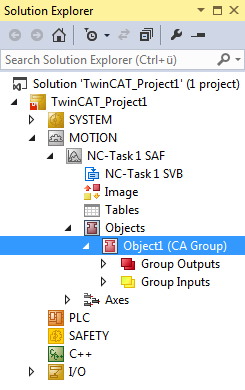
- 3. Fügen Sie dem Eintrag Objects in der NC-Konfiguration die entsprechende Gruppe hinzu:
Für koordinierte Bewegung, mehrdimensionale Bewegungen: CA-Gruppe (TF5410 TwinCAT 3 Collision Avoidance).
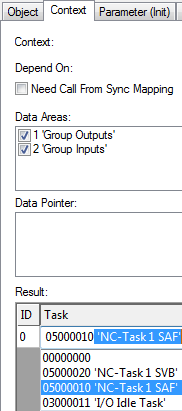
- 4. Prüfen Sie die Ausführungstask in der Gruppe. Diese muss immer auf "NC-Task 1 SAF" gesetzt sein.
- 5. Konfigurieren Sie die Gruppenparameter entsprechend der gewünschten Anwendung.
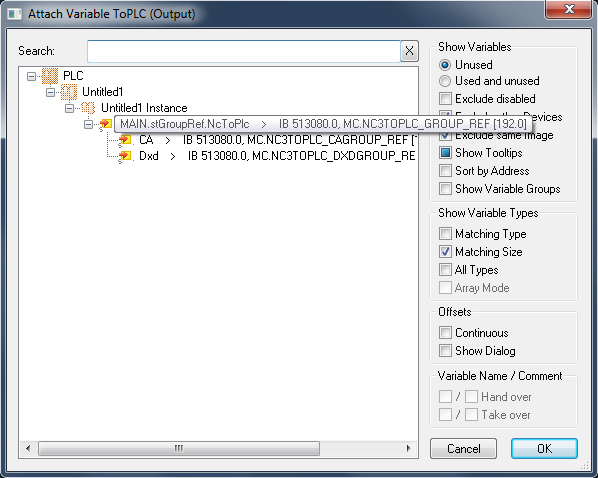
Für weitere Erläuterungen zu den Gruppenparametern siehe CA-Gruppe (TF5410 TwinCAT 3 Collision Avoidance). - 6. Um die Gruppe aus der SPS zu adressieren, muss eine zyklische Schnittstelle deklariert und mit den I/Os der Gruppe verknüpft werden (siehe SPS-Bibliothek Tc3_McCoordinatedMotion). Um die Achsen zu adressieren und zu aktivieren, muss die Bibliothek Tc2_Mc2 dem Projekt hinzugefügt werden.
- Eine neue NC/PTP NCI Configuration wurde erstellt.
VAR
stGroupRef : AXES_GROUP_REF;
END_VAR 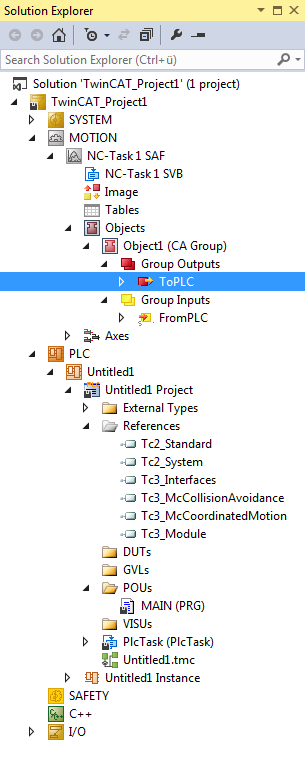
Weiterführende Informationen