Pick & Place
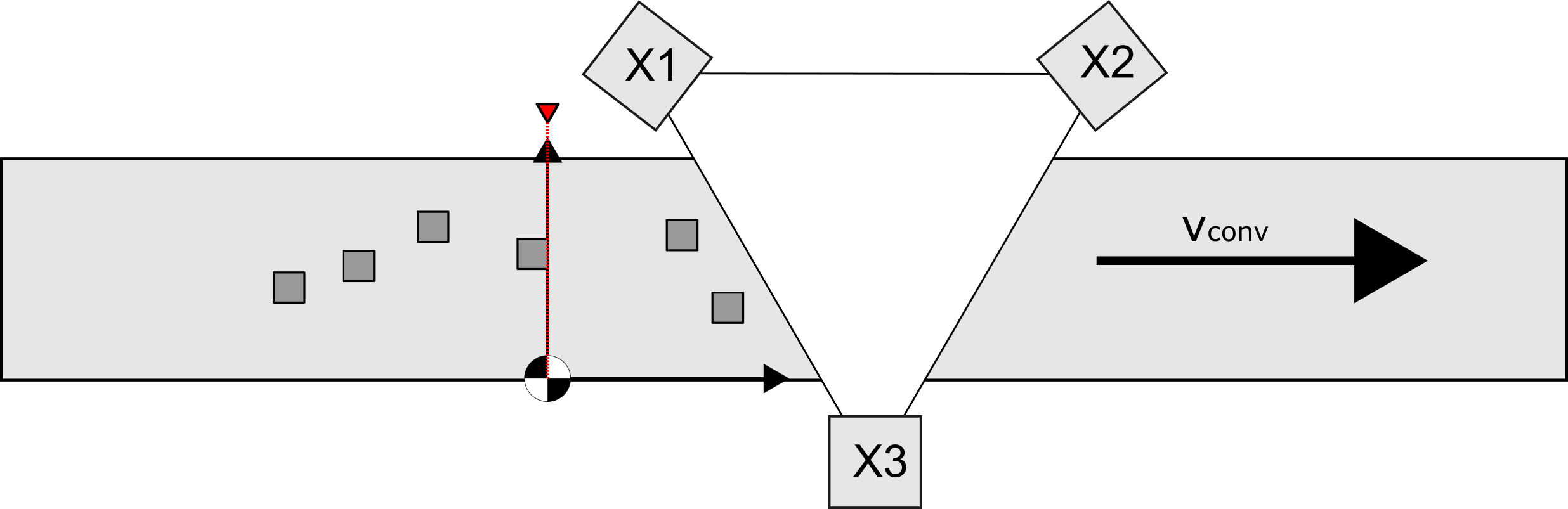
Nachfolgende Abbildung zeigt schematisch eine Delta-Kinematik (X1-X2-X3) für Pick & Place von Objekten bzw. Werkstücken, die vom linearen Förderer gegriffen werden.
Konfiguration und Programmbeispiel siehe Anwendungsbeispiel: Pick & Place.