Programmbeispiele
Beispiel 1
Im folgenden Testprogramm wird ein Quadrat mit einer Kantenlänge von 100 mm gefahren, wobei jede Seite in 100 Einzelsätze segmentiert ist. Ausgehend von einer Vorlaufzeit von 2 Sekunden wird bei immer kleineren Werten sichtbar, dass aufgrund der pulsierenden Satzversorgung ab einer bestimmten Schwelle die Bahngeschwindigkeit nicht mehr konstant gehalten werden kann.
Beispiel 2
Die Berücksichtigung der gemittelten Vorschubgeschwindigkeit bei der Berechnung der Vorlaufzeit ist in der Grundeinstellung immer aktiv. Für das Einfahren von Programmen und für Diagnosezwecke ist diese Funktion mit dem Kanalparameter P-CHAN-00428 (calc_average_feed_ahead) abschaltbar.
Mit dem nachfolgend aufgeführten idealisierten Testprogramm wird der Einfluss dieser gemittelten Vorschubgeschwindigkeit auf die Genauigkeit der tatsächlichen Vorlaufzeit untersucht und verdeutlicht.
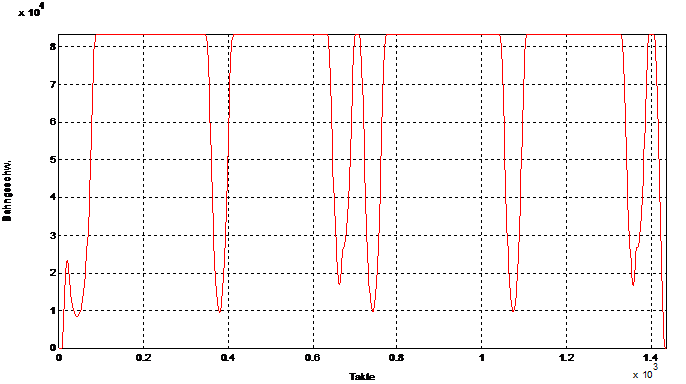
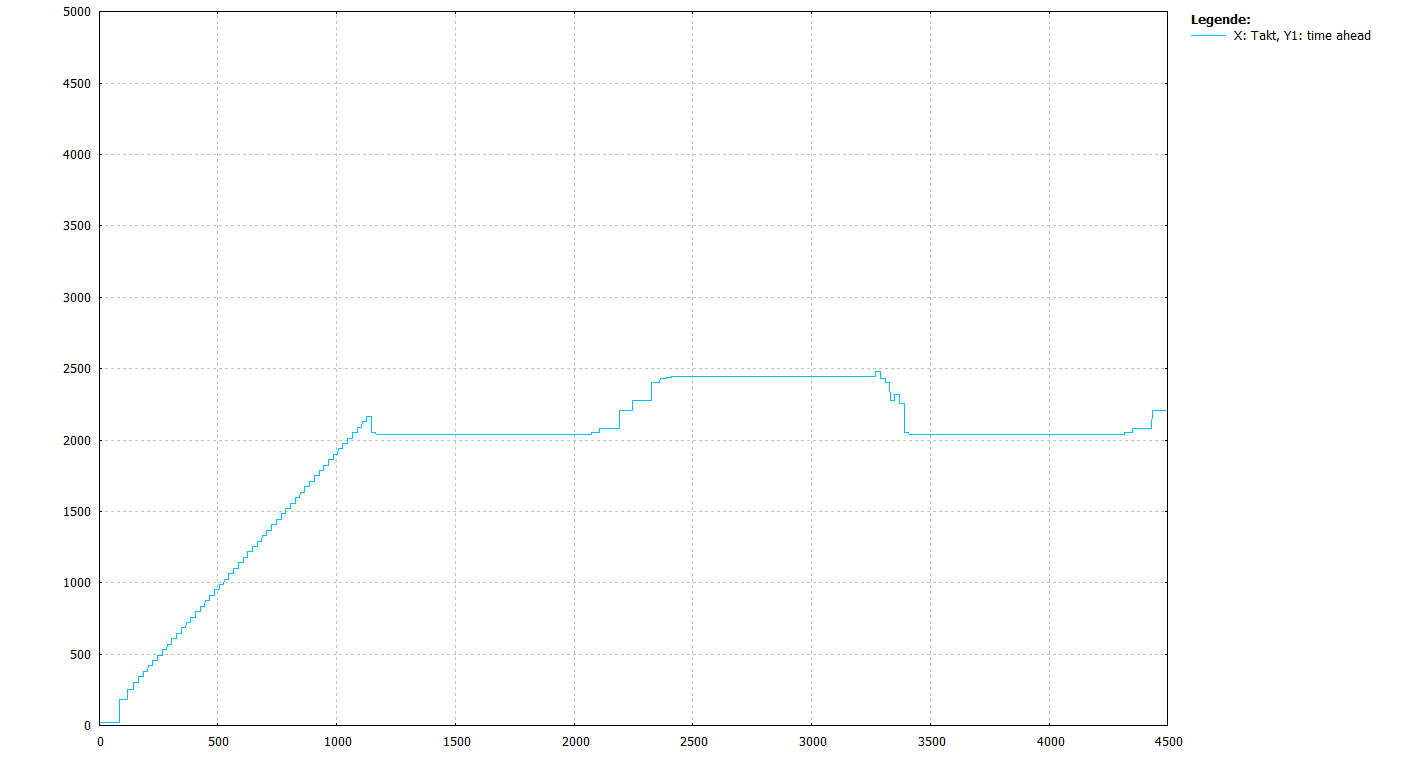
Test 1:
Programm mit 40 mm Linearsätzen und Vorschublimits, Vorlaufzeit 2s
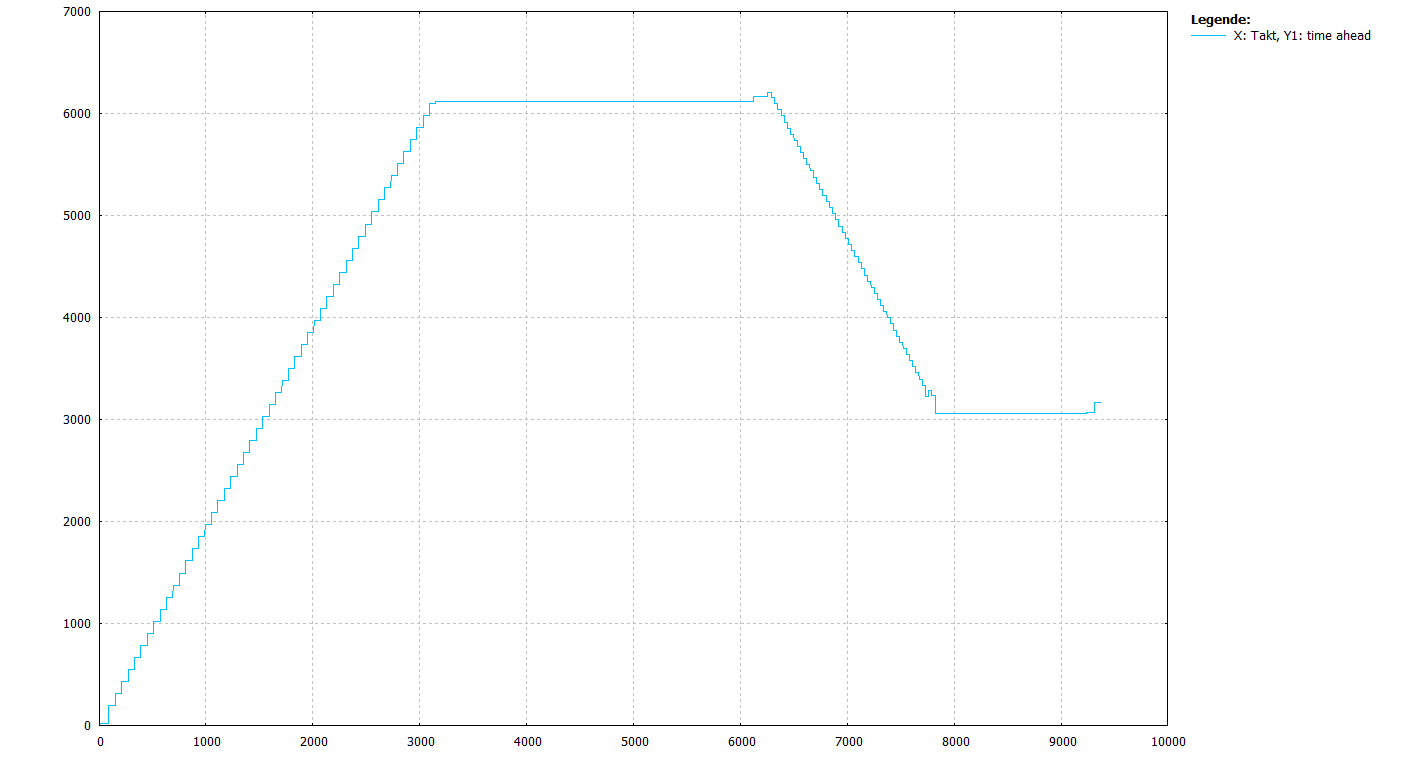
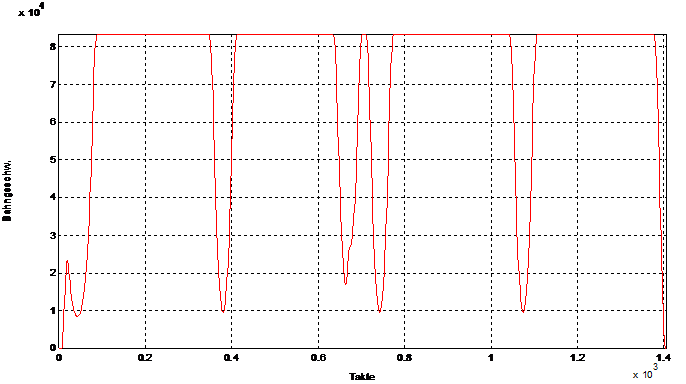
Durch die langen Geometriesätze (40mm) ist die Satzversorgung gewährleistet. Die Geschwindigkeitsbeinflussung über #VECTOR LIMIT wird wegen P-CHAN-00428 = 0 bei der Vorlaufzeitberechnung nicht berücksichtigt. Die gewünschte Vorlaufzeit von 2 s wird deutlich überschritten
Es kommt beim Start zu einer leichten Überschreitung, die aber nachgeregelt wird. Die gewünschte Vorlaufzeit von 2 s wird im Wesentlichen eingehalten
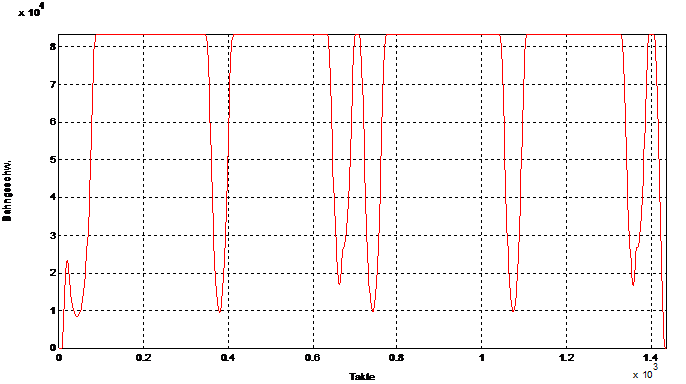
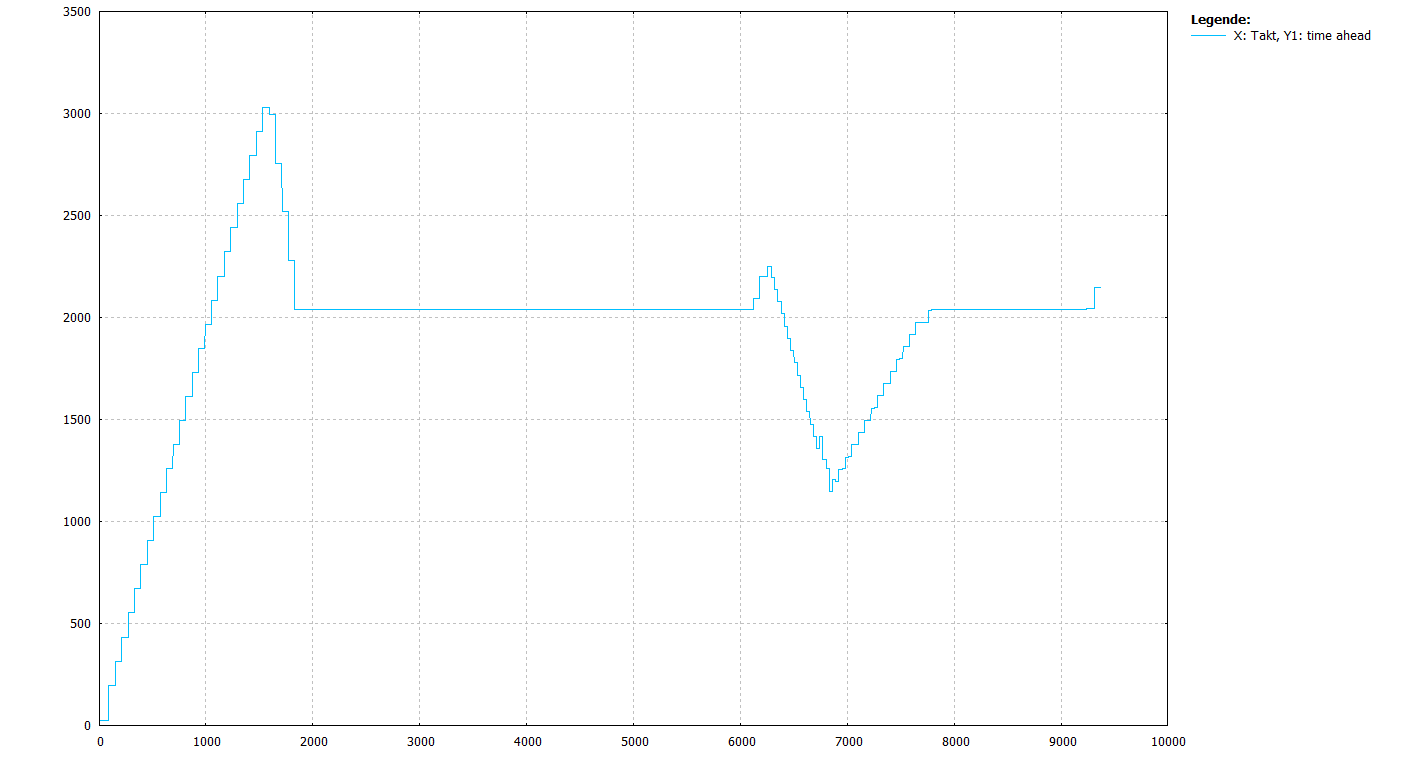
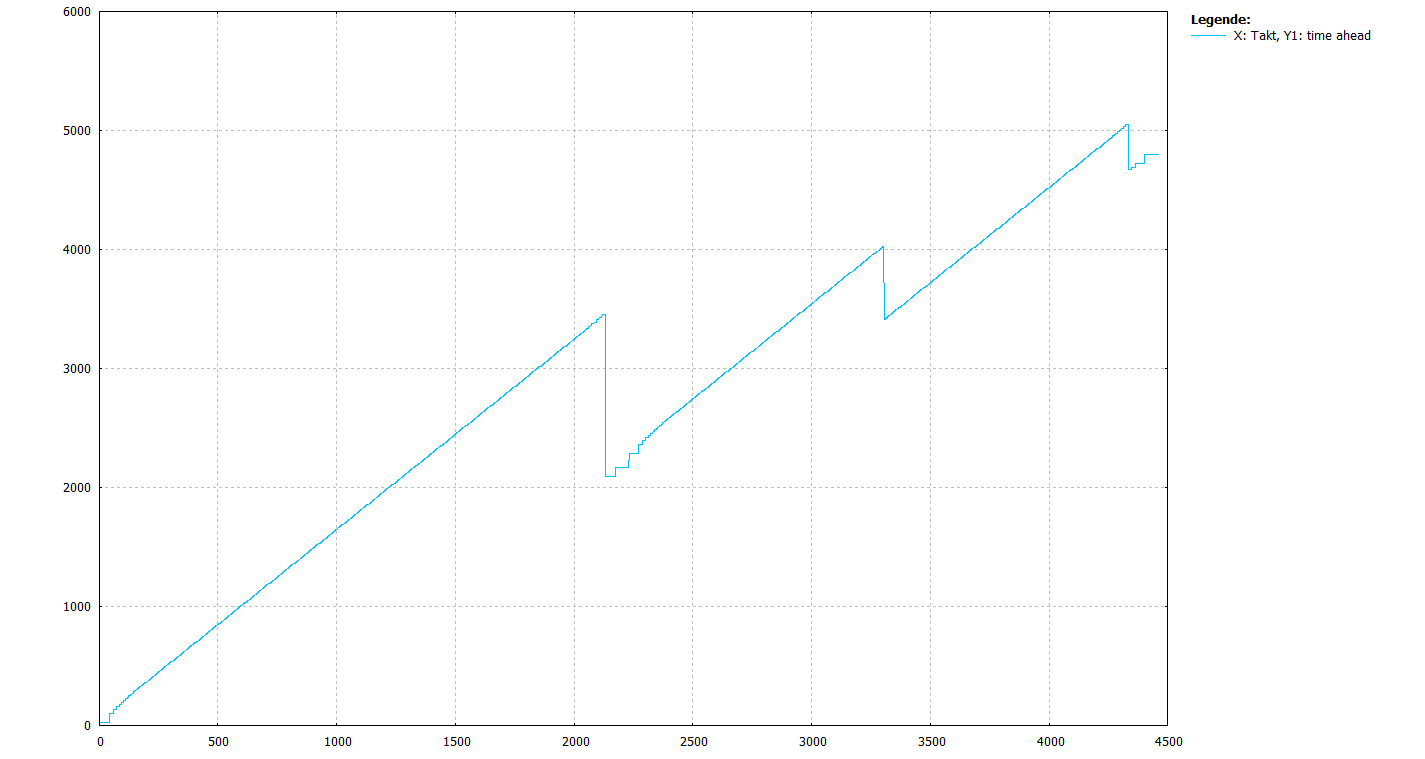
Test 2:
Programm mit 10 mm (kurzen) Linearsätzen und Vorschublimits, Vorlaufzeit 2s
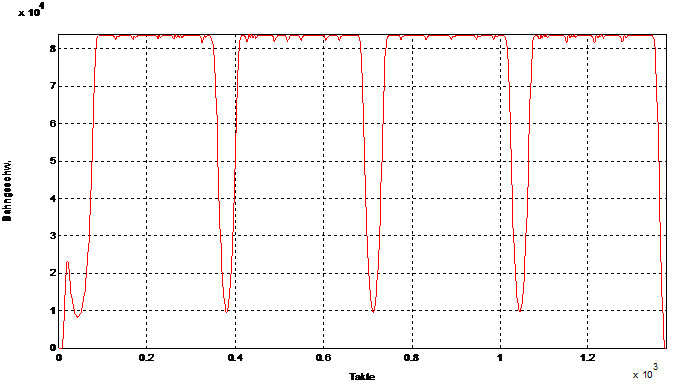
Durch die kurzen Geometriesätze (10mm) hat die Gewährleistung der Satzversorgung bei der Interpolation Priorität. Eine stabile Vorlaufbegrenzung wird nicht erreicht. Die gewünschte Vorlaufzeit von 2 s wird deutlich überschritten.
Es kommt beim Start zu einer leichten Überschreitung, die aber nachgeregelt wird. Die gewünschte Vorlaufzeit von 2 s wird im Wesentlichen eingehalten.
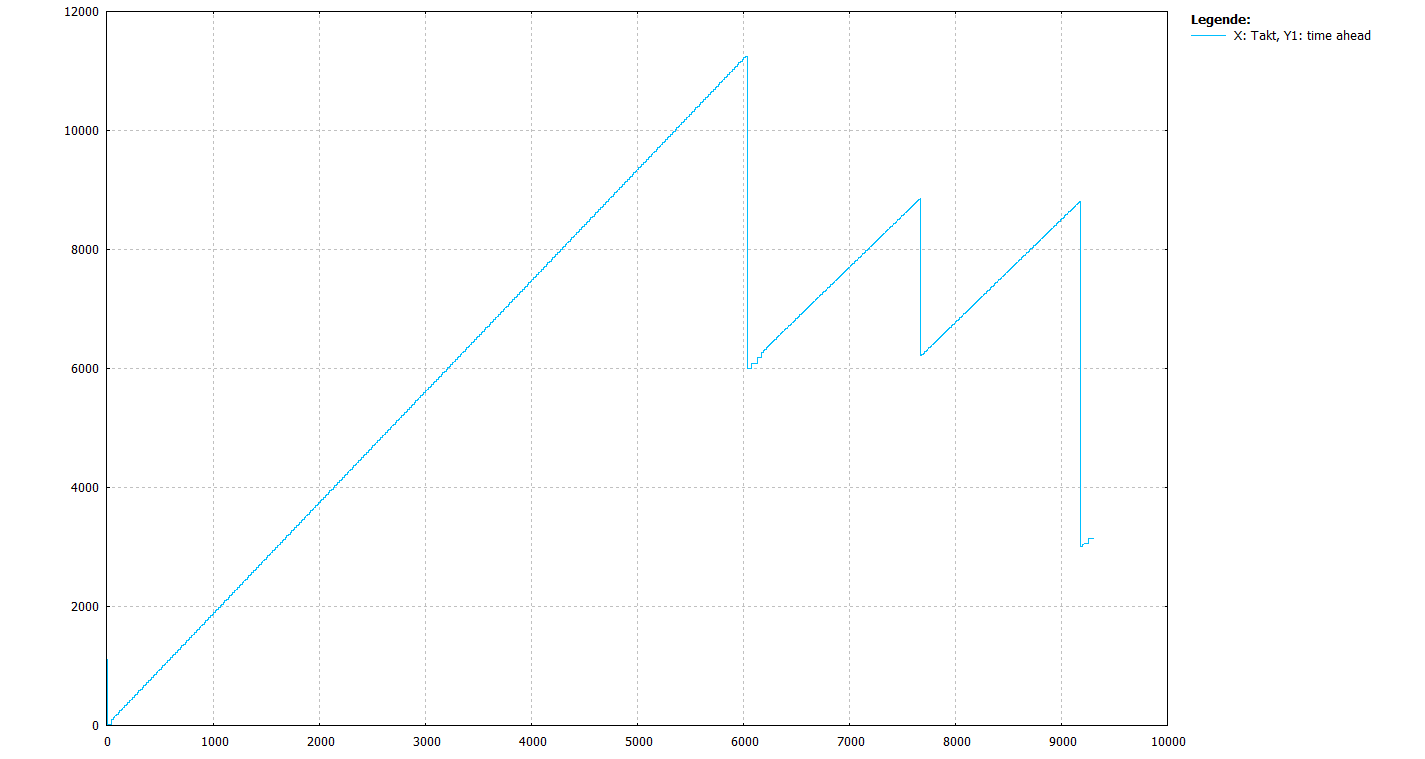
Test 3:
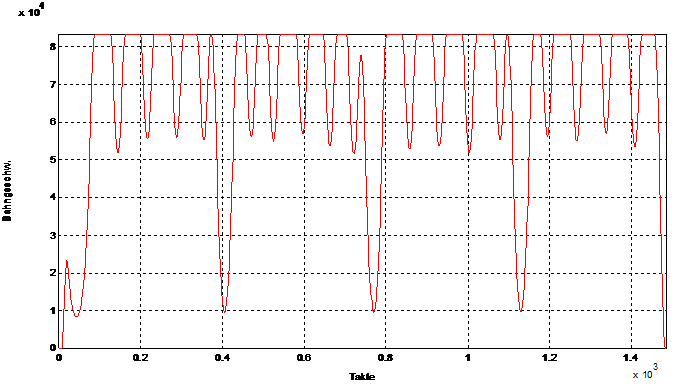
Programm mit 40mm Linearsätzen, ohne Vorschublimits, Vorlaufzeit 2s
Es kommt beim Start zu einer leichten Überschreitung, die aber nachgeregelt wird. Die gewünschte Vorlaufzeit von 2 s wird im Wesentlichen eingehalten.
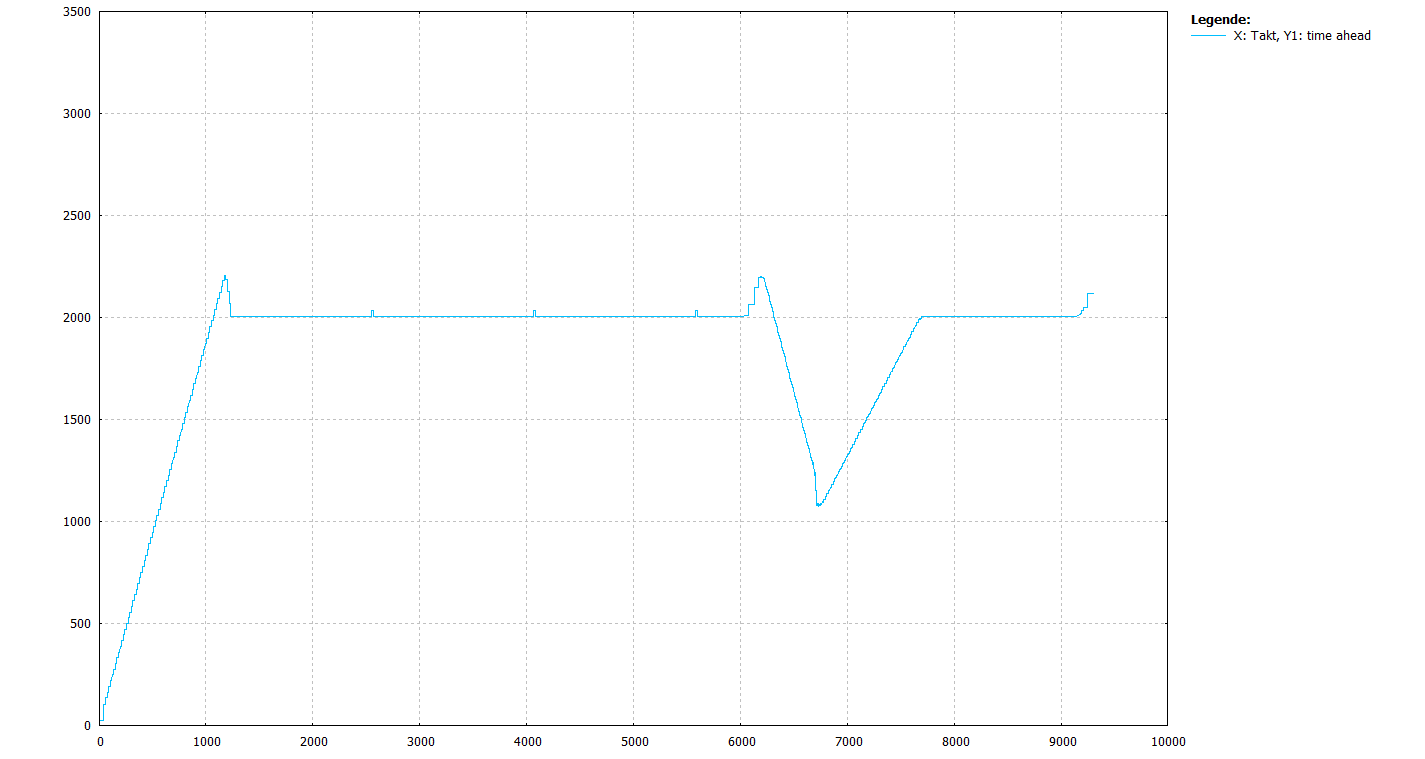
Test 4:
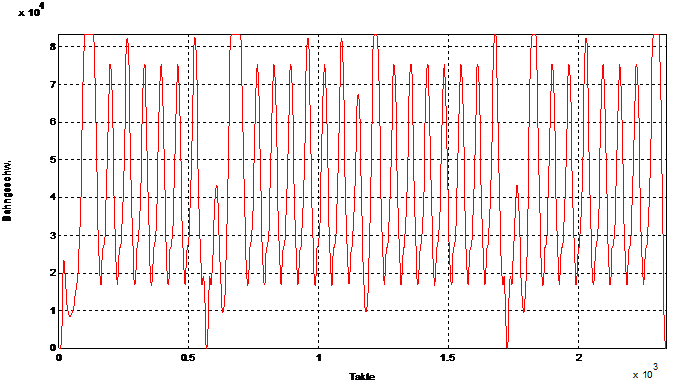
Programm mit 10mm (kurzen) Linearsätzen, ohne Vorschublimits, Vorlaufzeit 2s
Durch die kurzen Geometriesätze (10mm) hat die Gewährleistung der Satzversorgung bei der Interpolation Priorität. Eine stabile Vorlaufbegrenzung wird nicht erreicht. Die gewünschte Vorlaufzeit von 2 s wird deutlich überschritten.
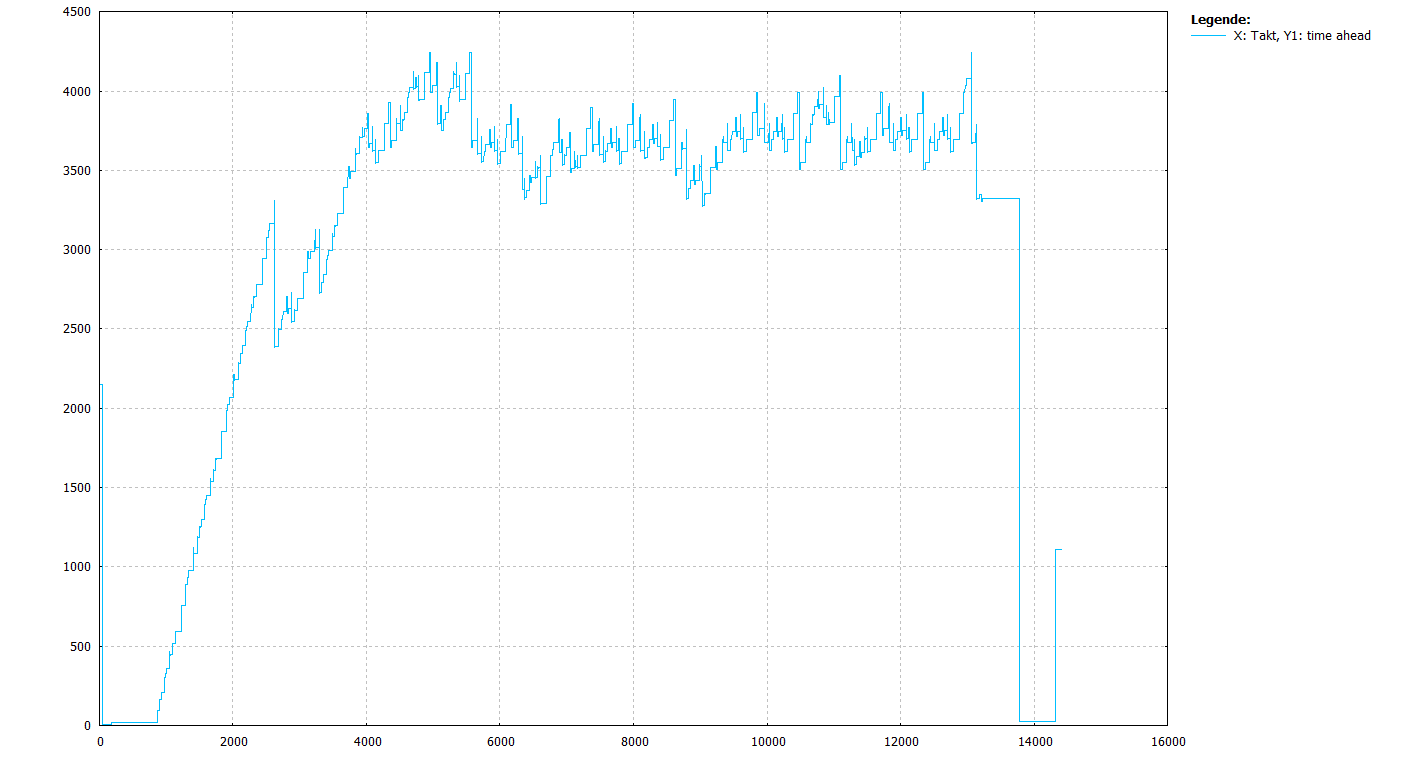
Beispiel 3
Nachfolgende Grafiken zeigen den Verlauf der Vorlaufzeit bei einem Programm aus der Praxis. Dieses ist gekennzeichnet durch stark schwankende Vorschübe (Eilgang- und Normalvorschub). Die sich daraus ergebenden Brems- und Beschleunigungsphasen können bei der Abschätzung der Vorlaufbegrenzung nicht exakt vorab berücksichtig werden und führen somit zu einer mehr oder weniger starken Abweichung zur programmierten Vorlaufzeit.
Test 1:
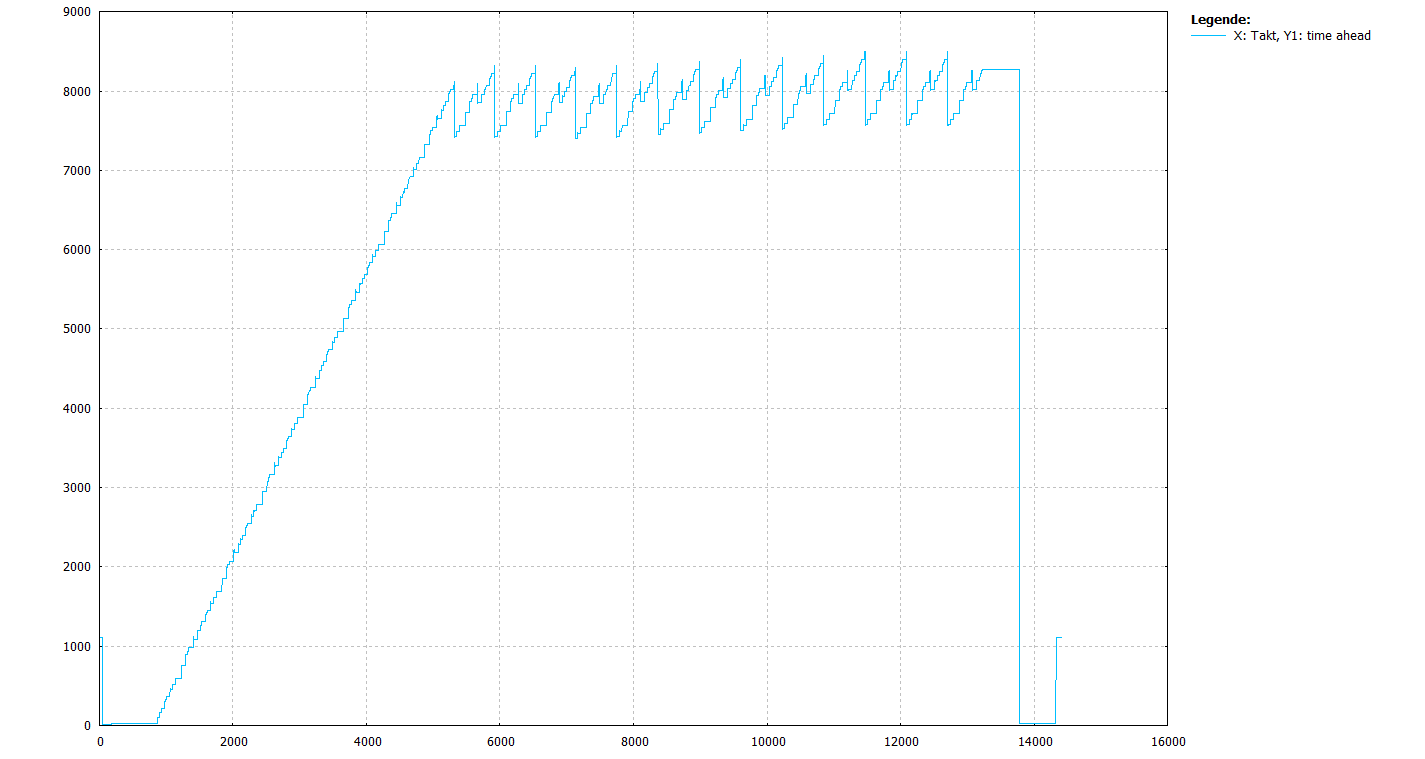
Test 2: